TECHNICAL NOTE
MOTION APPLICATION ENGINEERING GROUP
Yaskawa Electric America - 2121 Norman Drive South – Waukegan IL 60085
(800) YASKAWA - Fax (847) 887-7280
11/23/2005 33 of 33 eng/05.055/MCD
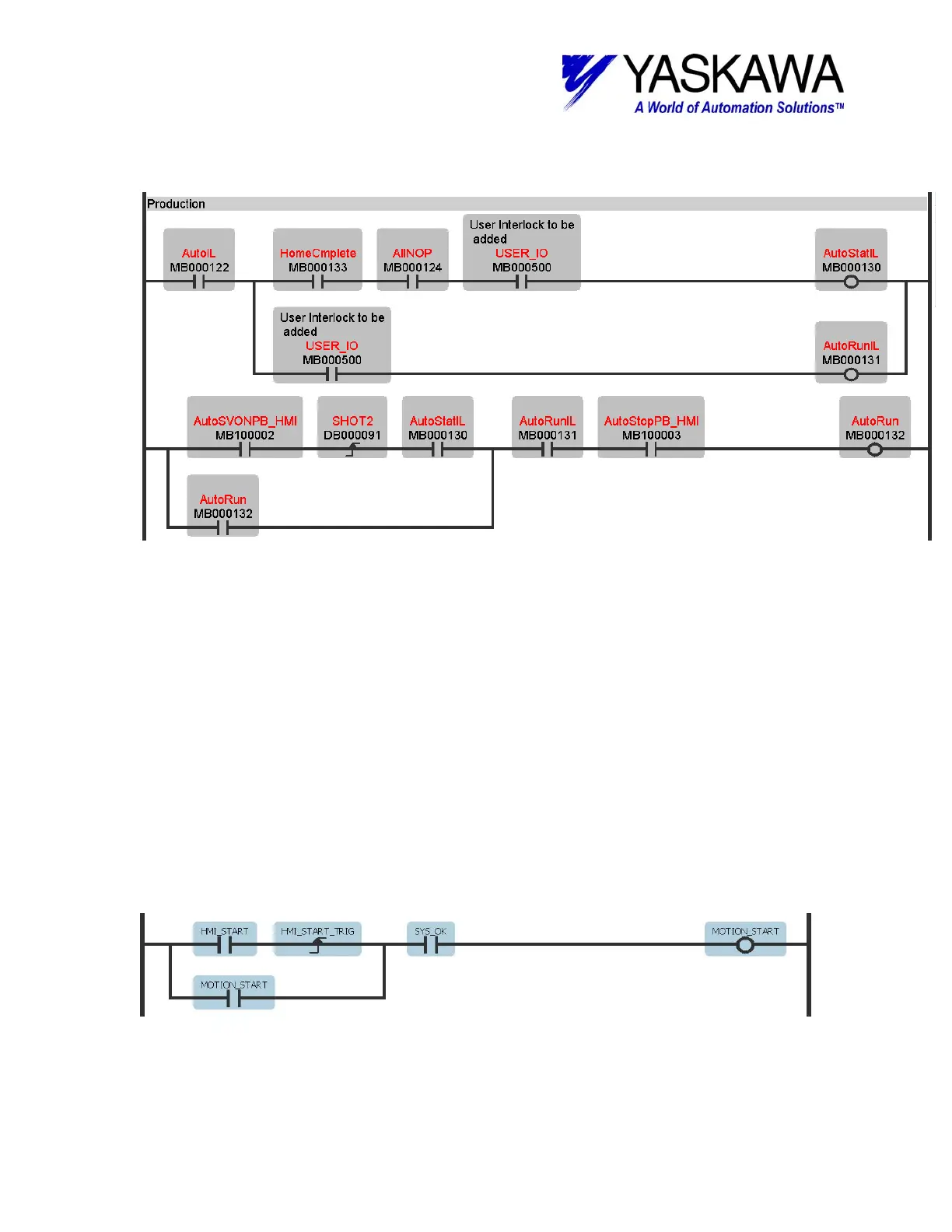
Auto Production Mode Interlock and starting
DWG L10.01
HMI interlock (limiting, setting, resetting, handshaking, interlocking)
Definition of information to be transferred initially (varies per application)
Purpose of Interlocking HMI
All command bits from an HMI to the controller should be programmed as latched momentary
signals. This provides added safety for any type of E-stop or power-off conditions that may
occur.
In the example below, the HMI_START is a command signal from the HMI that is read only on a
rising edge. The SYS_OK must be closed indicating that the system is operating properly before
motion can start. When the HMI_START bit has a rising edge, the MOTION_START coil is
activated and latched on until the SYS_OK bit goes low.
It is recommended to limit values from HMI so that errors are prevented (i.e. putting to small/large
of value into a register)