APPLICATIONS OF Σ-SERIES PRODUCTS
3.2.6 Using Contact Input Speed Controlcont.
86
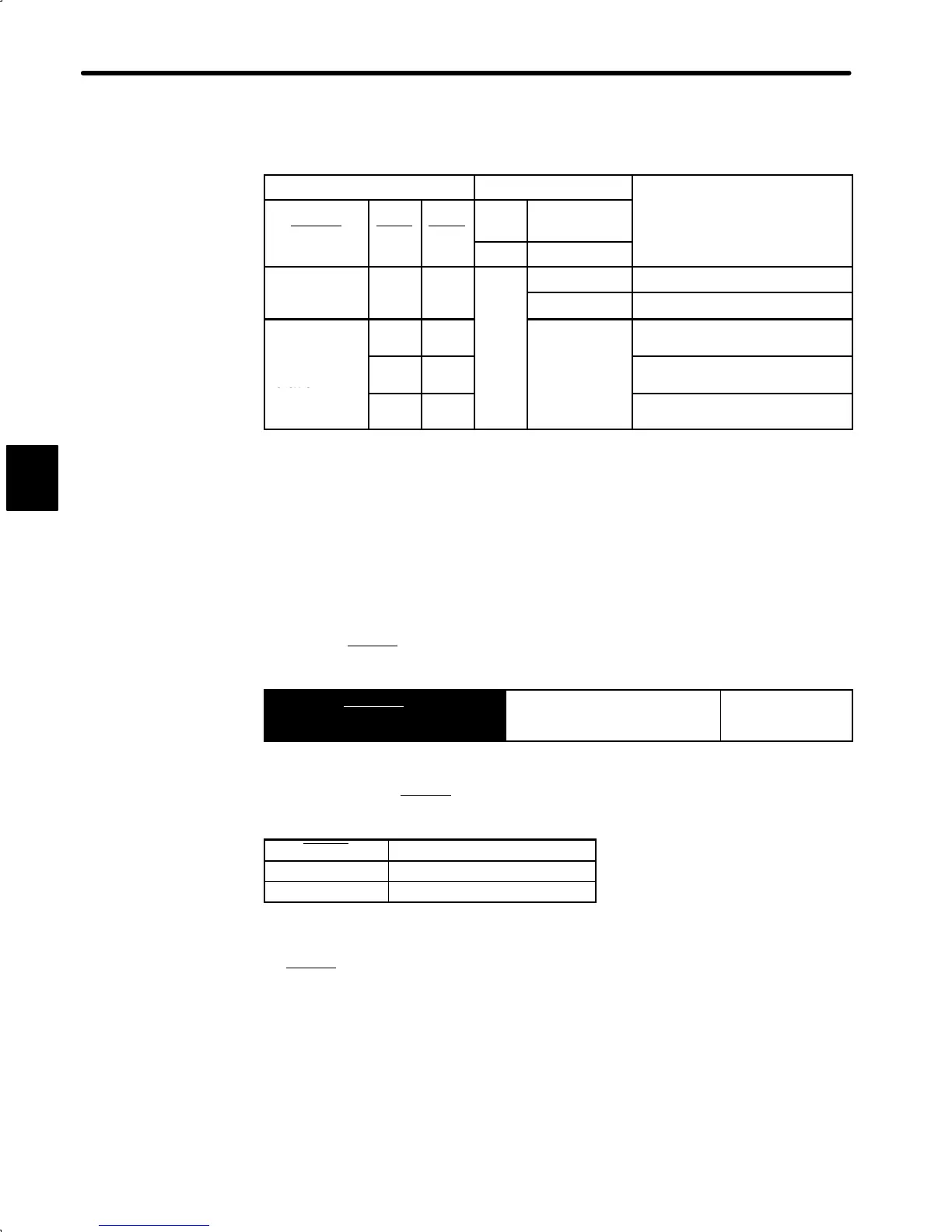
• For Position Control:
0: OFF, 1: ON
Contact Signal
User Constant
P-CON P-CL N-CL
Cn-0
2
Cn-01
Selected Speed
Bit 2 Bit F
0 Stop
−−−− 0 0
u
se re
erence
npu
Direction of
rotation
0 1
1
SPEED (Cn-1F)
0: Forward
rotation
1 1
−−−−
SPEED (Cn-20)
1: Reverse
rotation
1 0 SPEED (Cn-21)
Preset values (0 or 1) and input signal status in the portions indicated by horizontal
bars (−) are optional.
Note When the contact input speed control function is used, the reference pulse inhibit
function is not available.
b) Standard Setting when Cn-02 bit 2 = 0
Input signals are used as external torque limit input.
Input signal P-CON
is used to specify the direction of motor rotation.
→ Input P-CON 1CN-15
Proportional Control, etc. For Speed/Torque
Control and
Position Control
a) Contact Input Speed Control when Cn-02 bit 2 = 1
Use input signal P-CON
to specify the direction of motor rotation.
P-CON Meaning
1 Reverse rotation
0 Forward rotation
0: OFF (high level), 1: ON (low level)
b) Standard Setting when Cn-02 bit 2 = 0
P-CON
signal is used for proportional control, zero-clamp and torque/speed control
changeover.
Note For the speed/torque control type, control by external reference (voltage refer-
ence) is possible when the contact input speed control function is used by setting
bits A and B of user constant Cn-01.
For the position control type, control by external reference (pulse reference) is
possible when the contact input speed control function is used by setting bit F of
user constant Cn-01.
3

 Loading...
Loading...





