2 Specifications and Settings
2.1.2 400 V Specifications
10
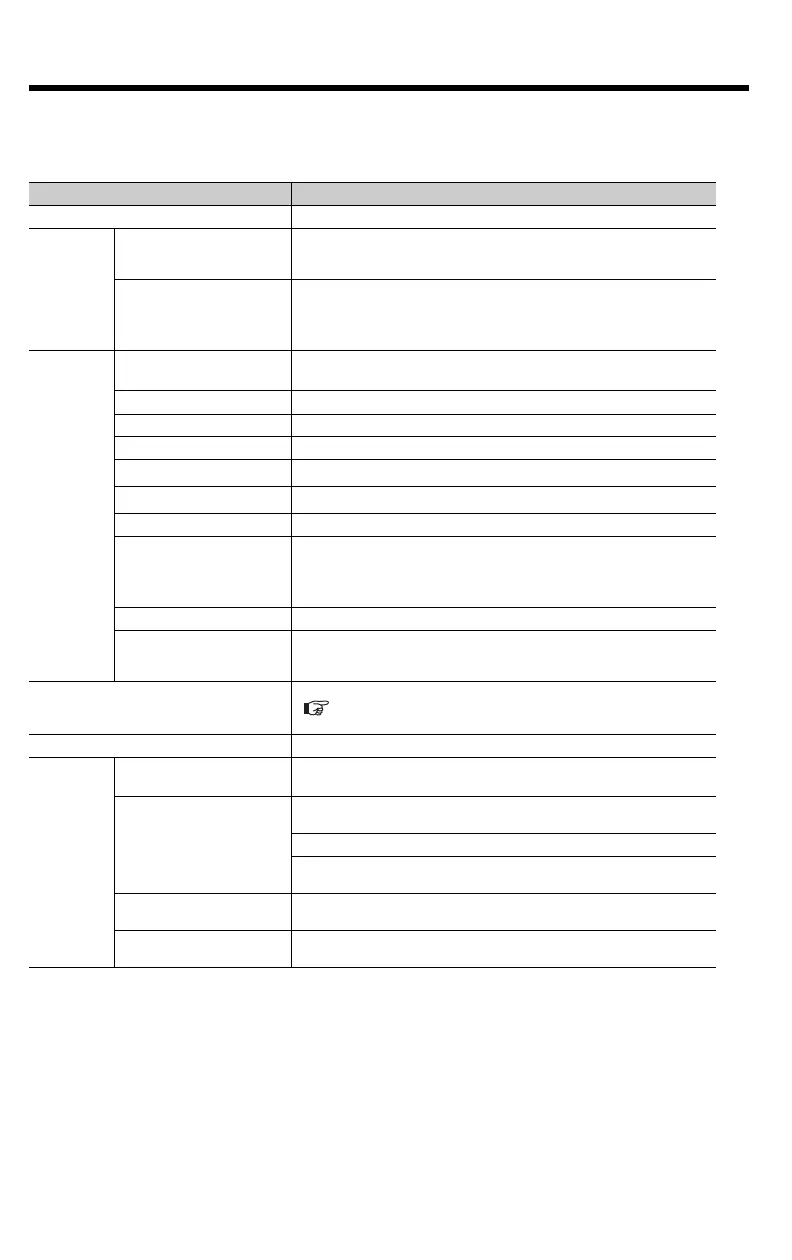
2.1.2 400 V Specifications
Item Specification
Control Method IGBT-based PWM control, sine wave current drive
Feedback
With Rotary
Servomotor
Serial encoder: 24 bits
(incremental encoder/absolute
encoder)
With Linear
Servomotor
• Absolute linear encoder (The signal resolution depends on
the absolute linear encoder.)
• Incremental linear encoder (The signal resolution depends
on the incremental linear encoder or Serial Converter Unit.)
Environ-
mental
Conditions
Surrounding Air
Temperature
*1
-5°C to 55°C
Storage Temperature -20°C to 85°C
Surrounding Air Humidity 95% relative humidity max. (with no freezing or condensation)
Storage Humidity 95% relative humidity max. (with no freezing or condensation)
Vibration Resistance
4.9 m/s
2
Shock Resistance
19.6 m/s
2
Degree of Protection
IP10
Pollution Degree
2
• Must be no corrosive or flammable gases.
• Must be no exposure to water, oil, or chemicals.
• Must be no dust, salts, or iron dust.
Altitude 1,000 m or less.
Others
Do not use the SERVOPACK in the following locations: Loca-
tions subject to static electricity noise, strong electromagnetic/
magnetic fields, or radioactivity
Applicable Standards
Refer to the following section for details.
Compliance with UL Standards, EU Directives, and Other
Safety Standards on page xxi
Mounting Base-mounted
Perfor-
mance
Speed Control Range
1:5000 (At the rated torque, the lower limit of the speed control
range must not cause the Servomotor to stop.)
Coefficient of Speed
Fluctuation
*2
±0.01% of rated speed max. (for a load fluctuation of 0% to
100%)
0% of rated speed max. (for a voltage fluctuation of ±10%)
±0.1% of rated speed max. (for a temperature fluctuation of
25°C ±25°C)
Torque Control Precision
(Repeatability)
±1%
Soft Start Time
Setting
0 s to 10 s (Can be set separately for acceleration and deceler-
ation.)