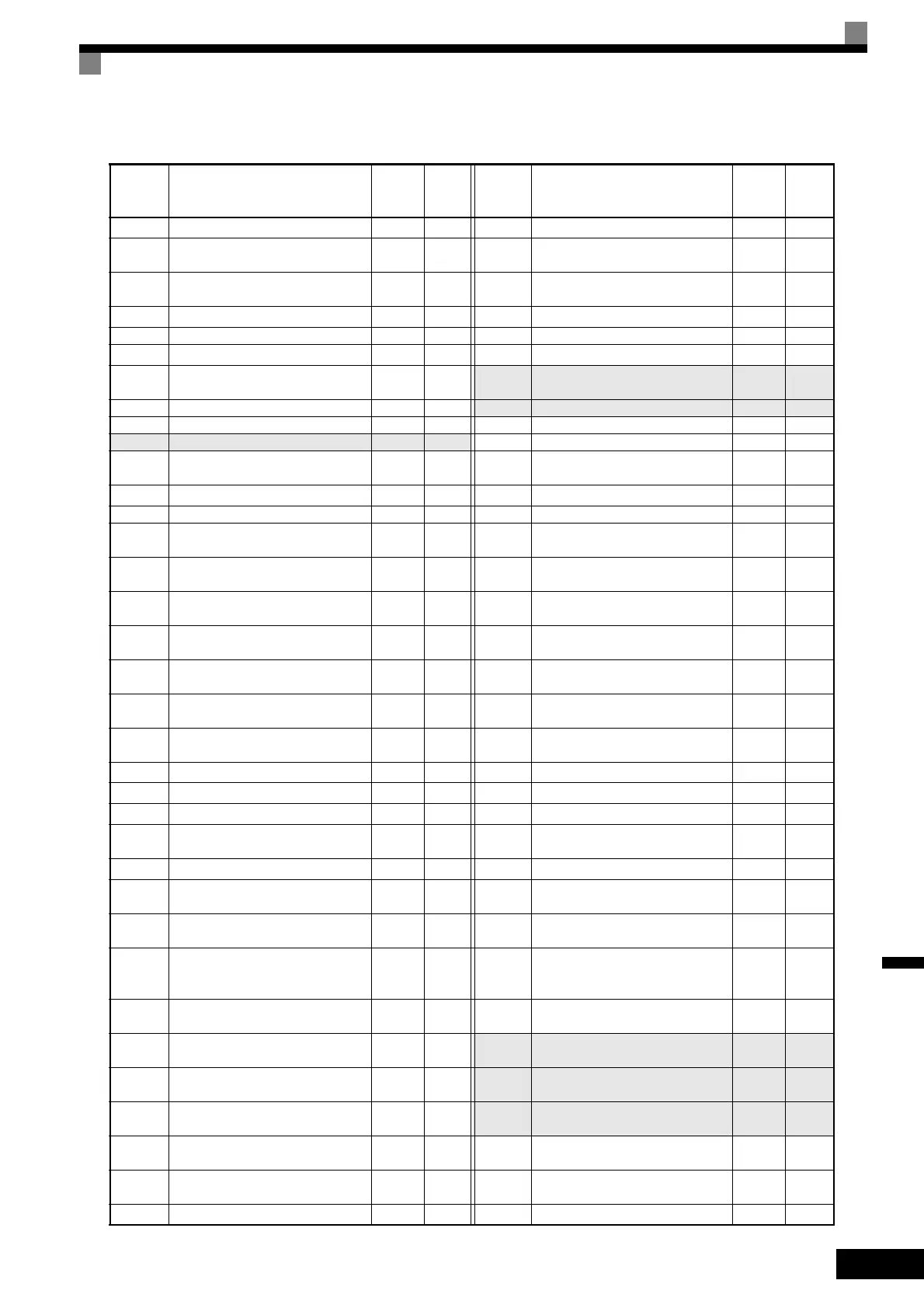
User Constants
10-33
10
E1-13 Base voltage
0.0
*11
F1-09 Overspeed detection delay time
0.0
*7
E2-01 Motor rated current
1.90
*6
F1-10
Excessive speed deviation detec-
tion level
10
E2-02 Motor rated slip
2.90
*6
F1-11
Excessive speed deviation detec-
tion delay time
0.5
E2-03 Motor no-load current
1.20
*6
F1-12 Number of PG gear teeth 1 0
E2-04 Number of motor poles 4 F1-13 Number of PG gear teeth 2 0
E2-05 Motor line-to-line resistance
9.842
*6
F1-14 PG open-circuit detection time 2.0
E2-06 Motor leak inductance
18.2
*6
F2-01
Bi-polar or uni-polar input selec-
tion
0
E2-07 Motor iron saturation coefficient 1 0.50 F3-01 Digital input option 0
E2-08 Motor iron saturation coefficient 2 0.75 F4-01 Channel 1 monitor selection 2
E2-09 Motor mechanical loss 0.0 F4-02 Channel 1 gain 1.00
E2-10
Motor iron loss for torque compen-
sation
14
*6
F4-03 Channel 2 monitor selection 3
E2-11 Motor rated output
0.40
*6
F4-04 Channel 2 gain 0.50
E3-01 Motor 2 control method selection 0 F4-05 Channel 1 output monitor bias 0.0
E3-02
Motor 2 max. output frequency
(FMAX)
60.0 F4-06 Channel 2 output monitor bias 0.0
E3-03 Motor 2 max. voltage (VMAX)
200.0
*2
F4-07
Analog output signal level for
channel 1
0
E3-04
Motor 2 max. voltage frequency
(FA)
60.0 F4-08
Analog output signal level for
channel 2
0
E3-05
Motor 2 mid. output frequency 1
(FB)
3.0
*2
F5-01 Channel 1 output selection 0
E3-06
Motor 2 mid. output frequency
voltage 1 (VC)
15.0
*9
F5-02 Channel 2 output selection 1
E3-07
Motor 2 min. output frequency
(FMIN)
1.5
*2
F5-03 Channel 3 output selection 2
E3-08
Motor 2 min. output frequency
voltage (VMIN)
9.0
*9
F5-04 Channel 4 output selection 4
E4-01 Motor 2 rated current
1.90
*6
F5-05 Channel 5 output selection 6
E4-02 Motor 2 rated slip
2.90
*6
F5-06 Channel 6 output selection 37
E4-03 Motor 2 no-load current
1.20
*6
F5-07 Channel 7 output selection 0F
E4-04
Motor 2 number of poles (number
of poles)
4 F5-08 Channel 8 output selection 0F
E4-05 Motor 2 line-to-line resistance
9.842
*6
F5-09 DO-08 output mode selection 0
E4-06 Motor 2 leak inductance
18.2
*6
F6-01
Operation selection after commu-
nications error
1
E4-07 Motor 2 rated capacity
0.40
*6
F6-02
Input level of external fault from
Communications Option Board
0
F1-01 PG constant 600 F6-03
Stopping method for external fault
from Communications Option
Board
1
F1-02
Operation selection at PG open cir-
cuit (PGO)
1 F6-04
Trace sampling from Communica-
tions Option Board
0
F1-03
Operation selection at overspeed
(OS)
1
F6-06
Torque reference/torque limit
selection from optical option
0
F1-04 Operation selection at deviation 3 F6-08
Operation selection after SI-T
WDT error
1
F1-05 PG rotation 0 F6-09
Number of SI-T BUS error detec-
tion
2
F1-06
PG division rate (PG pulse moni-
tor)
1 H1-01 Terminal S3 function selection 24
F1-07
Integral value during accel/decel
enable/disable
0 H1-02 Terminal S4 function selection 14
F1-08 Overspeed detection level 115 H1-03 Terminal S5 function selection
3 (0)
*12
Table 10.7 User Constants (Continued)
No. Name
Fac-
tory
Setting
Set-
ting
No. Name
Fac-
tory
Setting
Set-
ting

 Loading...
Loading...












