2 Machine Synchronization
2.5.4. Slave robot configuration parameters
573HAC18154-1 Revision: F
© Copyright 2004-2008 ABB. All rights reserved.
2.5.4. Slave robot configuration parameters
Overview
For default configuration, see System parameters on page 74.
Use RobotStudio to change the parameters and to set up the slave robot.
Description
To make the slave robot stop and restart synchronized with the master robot:
• Set the parameter value min_sync_speed to 0.0
The slave robot will also stop if a fine point is defined in the master robot path.
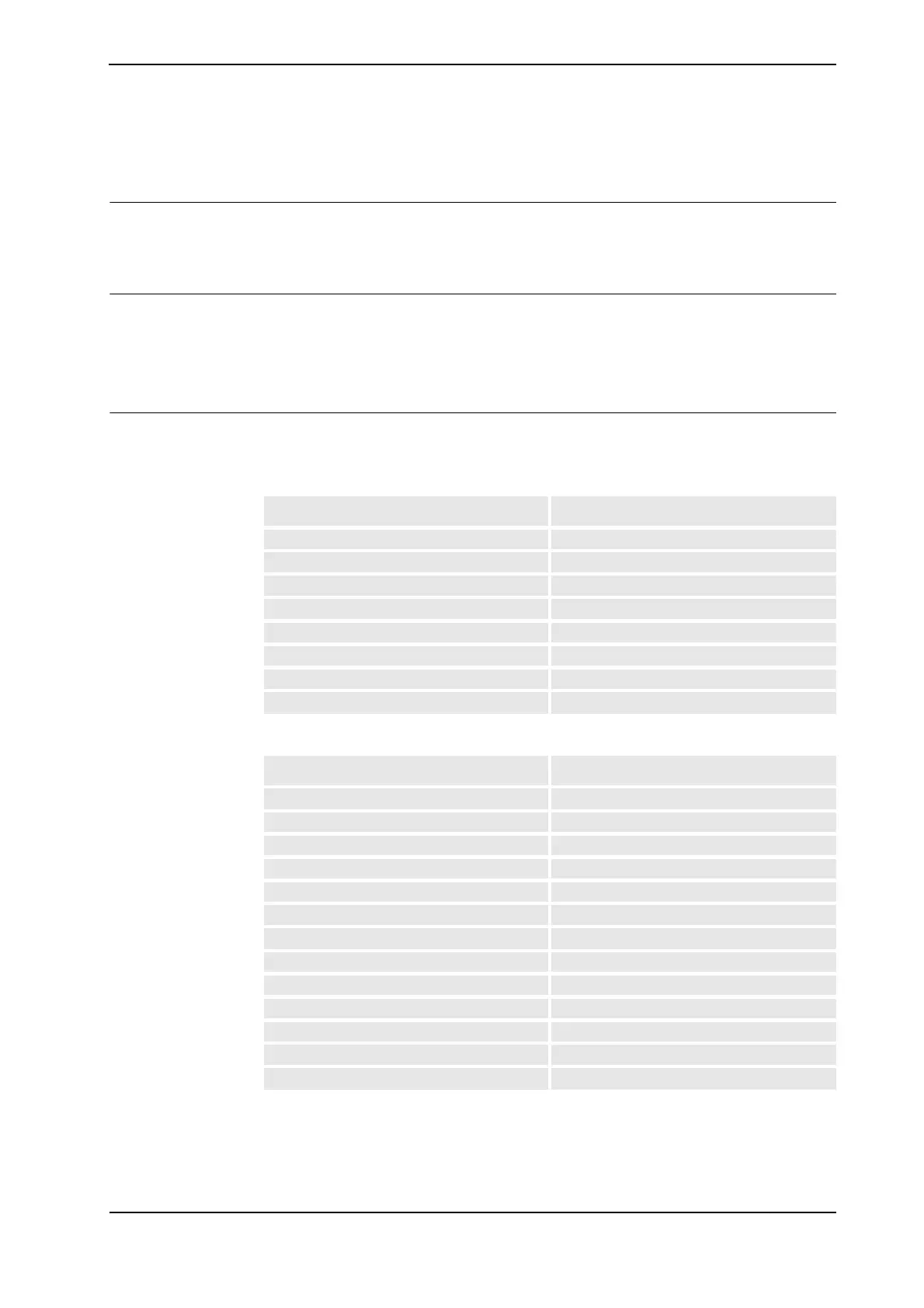
Topic: Process
SENSOR_SYSTEM
CAN_INTERFACE
SENSOR_SYSTEM/Parameter Value
Name SSYNCS1
sensor_type CAN
use_sensor CAN1
adjustment_speed 1000
min_dist 600
max_dist 20000
correction_vector_ramp_length 10
nominal_speed 1000
CAN_INTERFACE/Parameters Value
Name CAN1
Signal delay 34
Connected signal c1Connected
Position signal c1Position
Velocity signal c1Speed
Null speed signal c1NullSpeed
Data ready signal
Waitwobj signal c1WaitWObj
Dropwobj signal c1DropWobj
Data Time stamp c1DTimestamp
RemAllPObj signal c1RemAllPObj
Virtual sensor NO
Sensor Speed filter 0,33
Continues on next page