3.6.2 SCOUT MINI ROS Package
3.6.3 RealSense D435 node ROS Package and RVIZ visualization
23
Testing the hardware by using can-utils
sudo apt install can-utils
roslaunch realsense2_camera rs_camera.launch
Command testing
# receiving data from can0
$ candump can0
# send data to can0
$ cansend can0 001#1122334455667788
scout_bringup: Start up the mobile base node.
scout_base: Control and monitor package based on ugv_sdk。
scout_description: scout_min URDF model, available for simulation of customized robots
equipped with sensors
scout_msgs:scout_mini message format definition。
realsense2_camera: Set up and start the depth camera function package, and you can use the
rviz visualization tool to view color maps, depth maps, dense point clouds, etc.
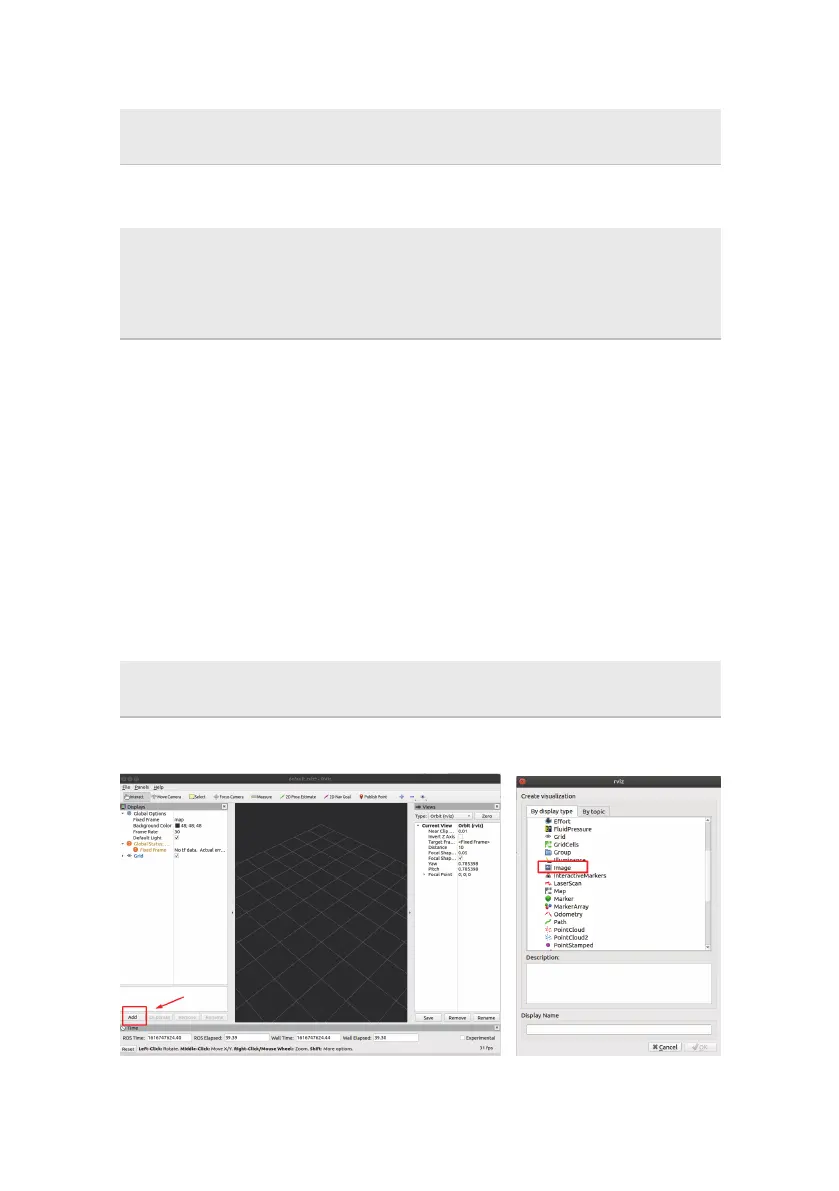
Enter rviz in the terminal to open rviz tool, click the add to add image component
Get the rgb

 Loading...
Loading...