3.6.5 VLP -16 ROS Package
26
velodyne_driver: Processing raw point cloud data and laser data function package
velodyne_laserscan: base on velodyne_driver package,Compress point cloud data,send /scan
data
velodyne_pointcloud: Start all the nodes of the VLP_16 lidar and start publishing various data.
velodyne_msgs: Define various data formats of VLP_16 lidar。
3.6.4 EAI -G4 ROS Package
ydlidar_ros: Start the EAI-G4 single-line lidar function package, and users can set some
parameters of the radar according to specific application scenarios.
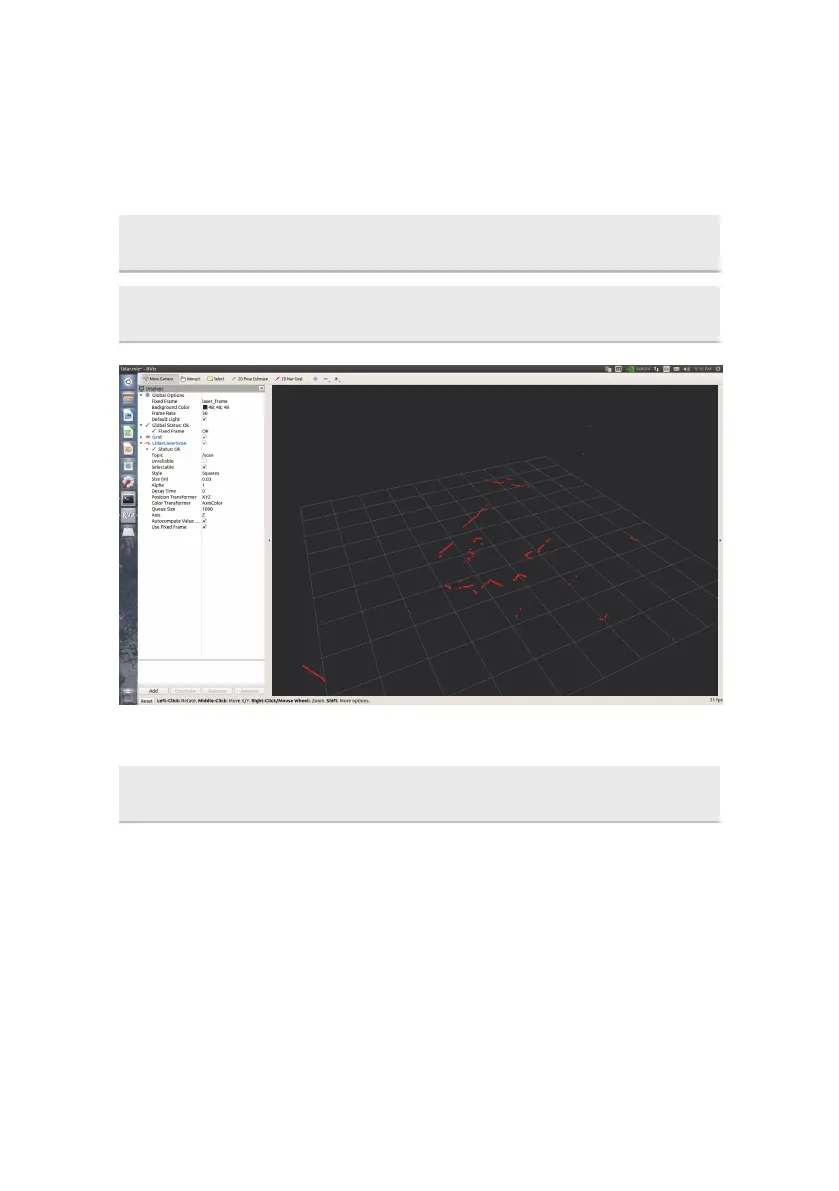
Show the scan result of the lidar
cd ydlidar/launch
Start lidar, publish base_link-><laser_link> coordinate transfer
roslaunch scout_bringup open_rslidar.launch
roslaunch ydlidar lidar_view.launch