Geometries with no orientation support
Rockwell Automation Publication MOTION-UM002F-EN-P - February 2018 101
See also
Define configuration parameters for a Delta Two-dimensional robot
on
page 99
Link lengths for Two-dimensional robot on page 94
End-Effector Offsets for Two-dimensional robot on page 95
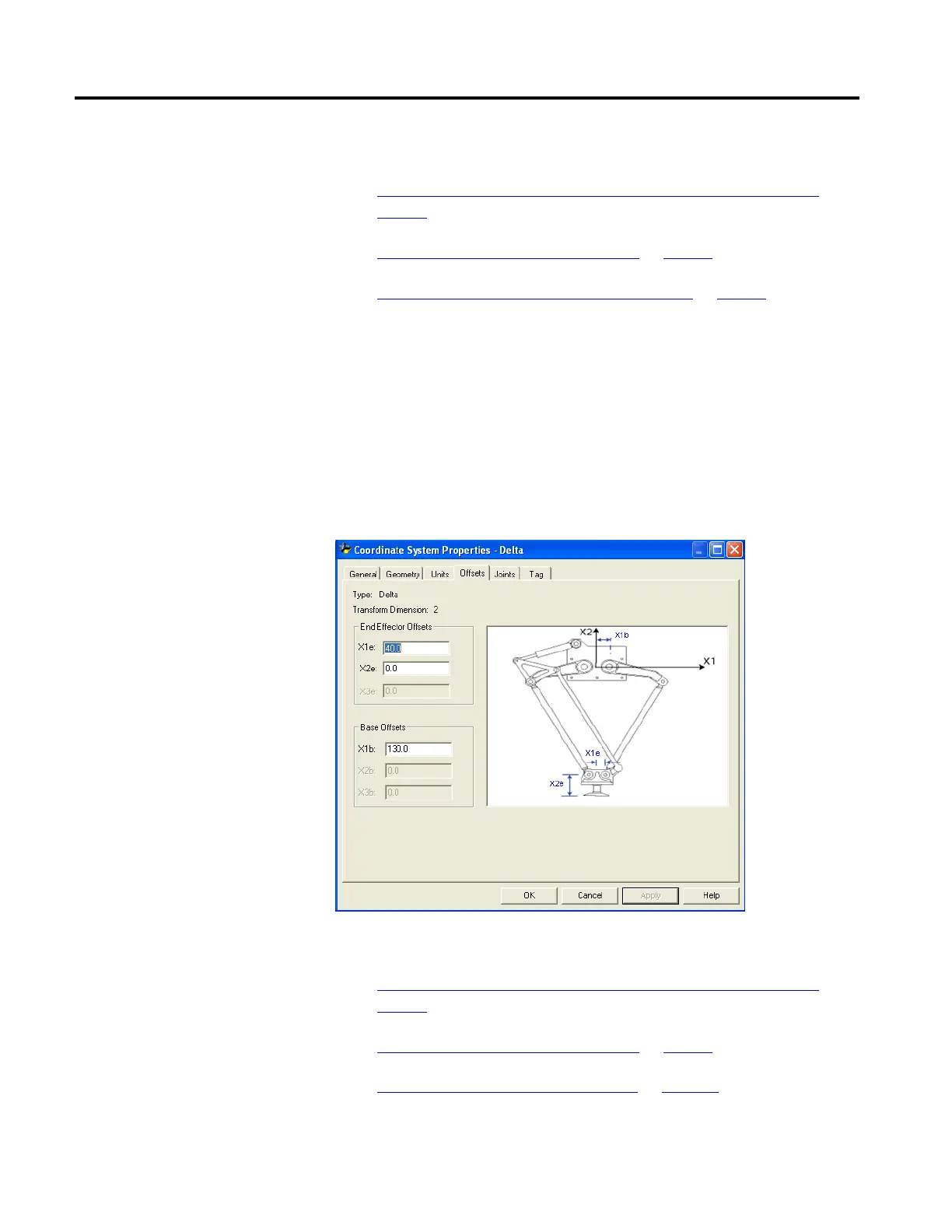
There are two end effector offsets available for the two-dimensional Delta robot
geometry.
• X1e - This is the offset distance from the center of the lower plate to the
lower spherical joints of the parallel arms.
• X2e - This is the distance from the lower plate to the TCP of the gripper.
Enter the end effector offset values on the Offsets tab in the Coordinate System
Properties dialog box.
See also
Define configuration parameters for a Delta Two-dimensional robot
on
page 99
Link lengths for Two-dimensional robot on page 94
Base Offsets for Two-dimensional robot on page 100
End-Effector Offsets for Delta
Two-dimensional robot

 Loading...
Loading...
