Geometries with no orientation support
Rockwell Automation Publication MOTION-UM002F-EN-P - February 2018 87
For example, if an Articulated Independent robot has two 10-inch arms, the
maximum reach is 20 inches. Programming to a Cartesian position beyond 20
inches produces a condition where no mathematical joint position exists.
Avoid programming the robot towards a no-
solution position when programming in Cartesian mode. The velocity of
the robot increases rapidly as it approaches this position and can result in injury or death to personnel.
See also
Arm solutions on page 83
The Logix Designer application supports three types of geometries that are often
called parallel manipulators.
• Three-dimensional Delta
• Two-dimensional Delta
• SCARA Delta
In these geometries, the number of joints is greater than the degrees of freedom,
and not all the joints are actuated (motor driven). These un-actuated joints are
typically spherical joints.
See also
Configure a Delta Three-dimensional robot on page 87
Configure a Delta Two-dimensional robot on page 96
Configure the SCARA Delta robot on page 102
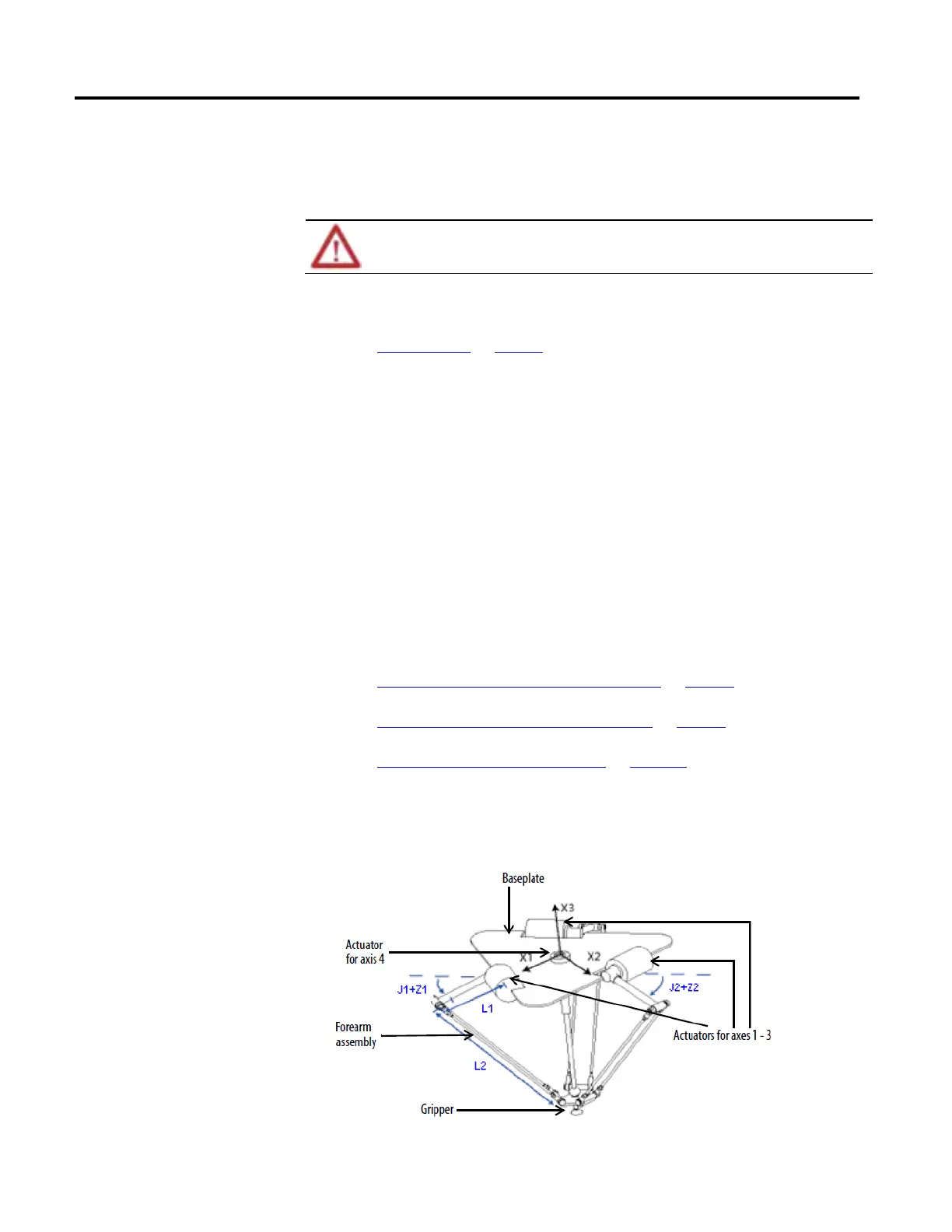
This illustration shows a four axes Delta robot that moves in three-dimensional
Cartesian (X1, X2, X3) space. This type of robot is often called a spider or
umbrella robot.
Three-dimensional robot

 Loading...
Loading...
