Cartesian coordinate system
Rockwell Automation Publication MOTION-UM002F-EN-P - February 2018 49
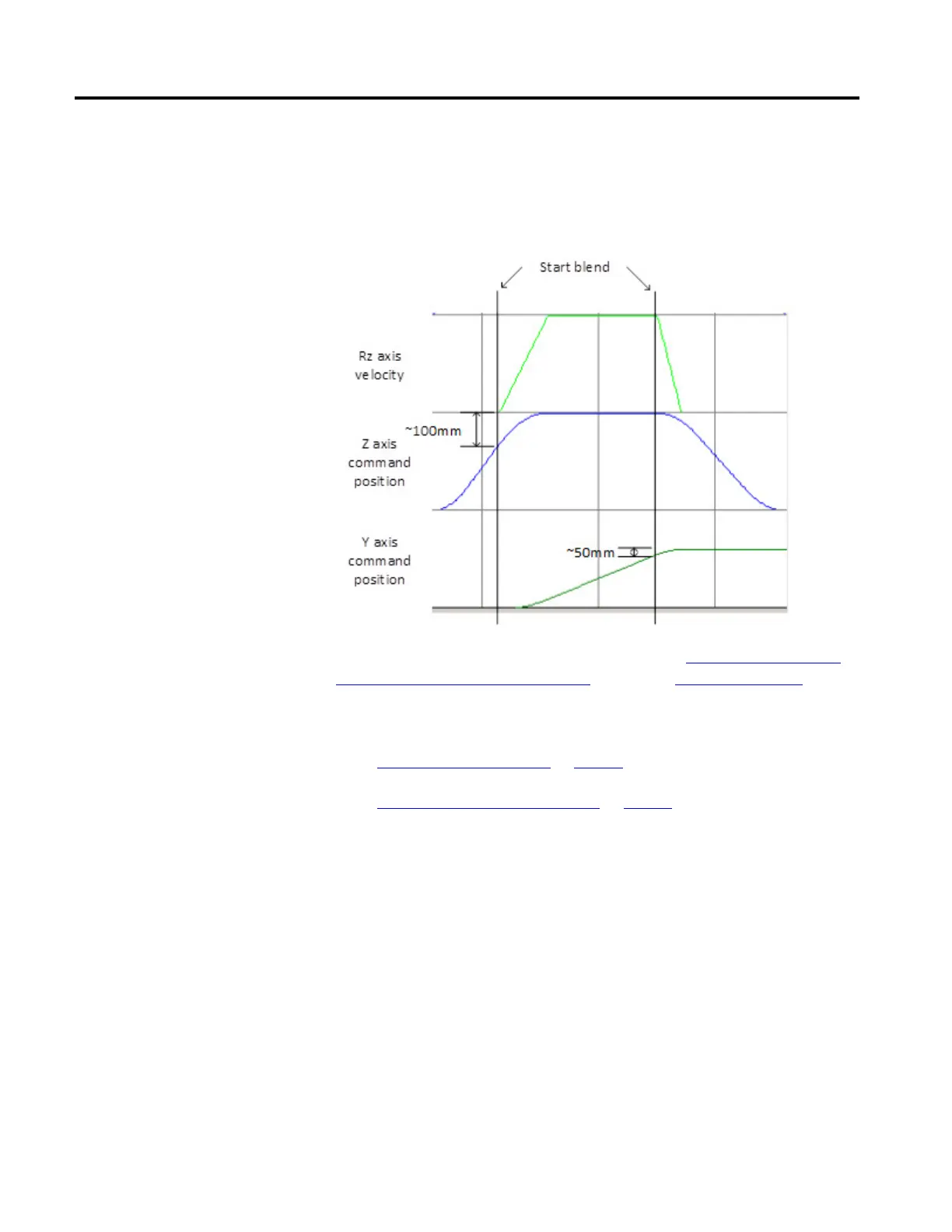
This trend shows the Rz orientation velocity profile and the Z and Y axis position
profiles versus time, and illustrates how the linear command tolerance parameter is
used with queued MCPM instructions to synchronize the orientation move with
respect to the CP linear motion.
For more information about Motion Instructions, see Logix 5000 Controllers
Motion Instructions Reference Manual, publication MOTION-RM002.
See also
Choose a termination type on page 55
Blending Path Move with MCPM on page 45
Use the superimposed move feature to superimpose multiple moves/instructions
on a single axis. This feature synchronizes a robot's motion with other parts of the
application (for example, conveyor tracking and vision systems).
As shown in the illustration, the inputs from various motion instructions are
added to produce superimposed motion on a single axis of a coordinate system.
The output can be seen on the Transforms side on all or one joint axes of a
coordinate system.
MCPM

 Loading...
Loading...
