Geometries with no orientation support
96 Rockwell Automation Publication MOTION-UM002F-EN-P - February 2018
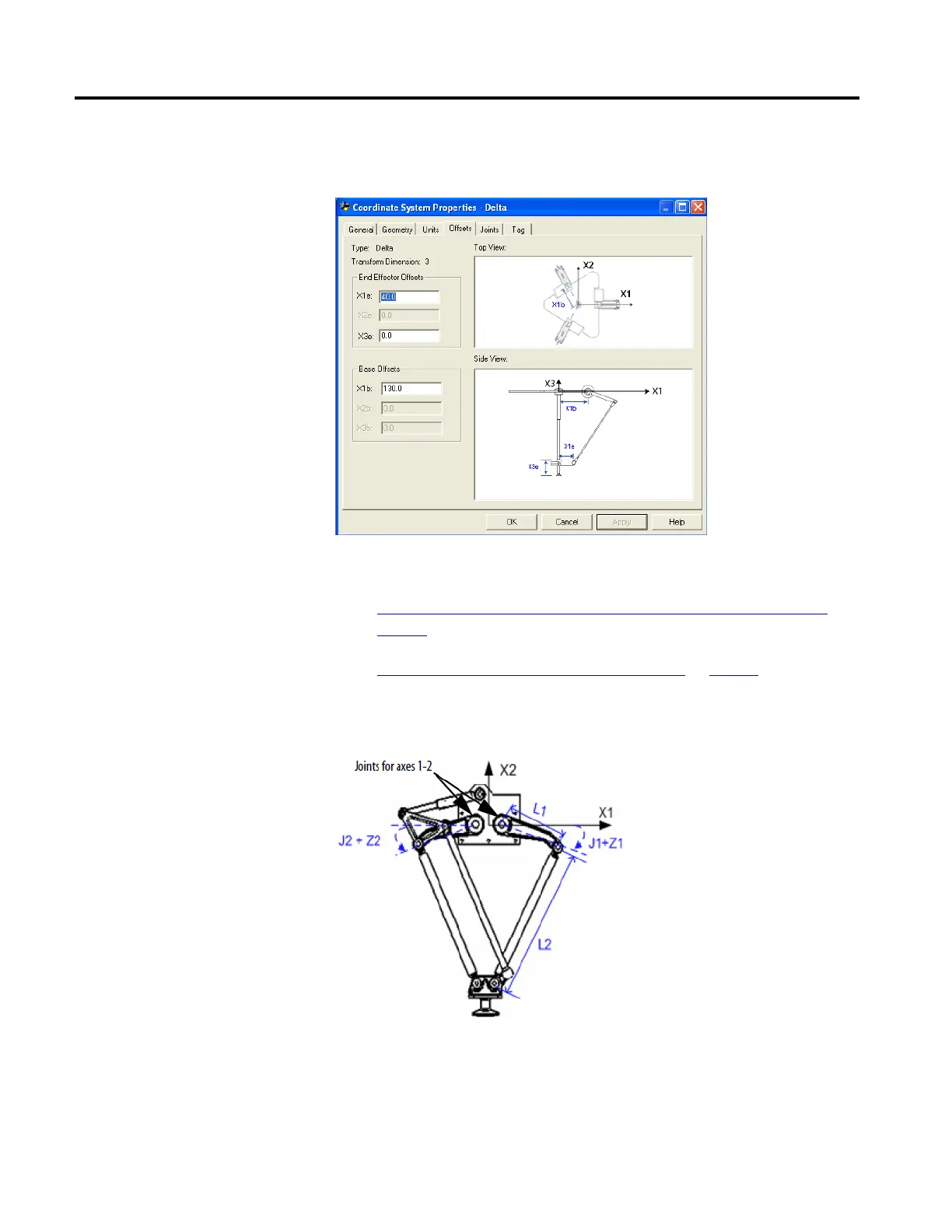
Offset values are always positive numbers. Enter the end effector offset values on
the Offsets tab in the Coordinate System Properties dialog box.
See also
Define configuration parameters for a Delta Three-dimensional robot
on
page 94
Base Offsets for Delta Three-dimensional robot on page 95
This illustration shows a two-dimensional Delta robot that moves in
two-dimensional Cartesian space.
This robot has two rotary joints that move the gripper in the (X1, X2) plane. Two
forearm assemblies attach a fixed top plate to a movable bottom plate. A gripper is
attached to the movable bottom plate. The bottom plate is always orthogonal to
the X2 axis and its position is translated in Cartesian space (X1, X2) by
mechanical parallelograms in each forearm assembly. The two joints, J1, and J2,
Two-dimensional robot

 Loading...
Loading...
