Geometries with no orientation support
72 Rockwell Automation Publication MOTION-UM002F-EN-P - February 2018
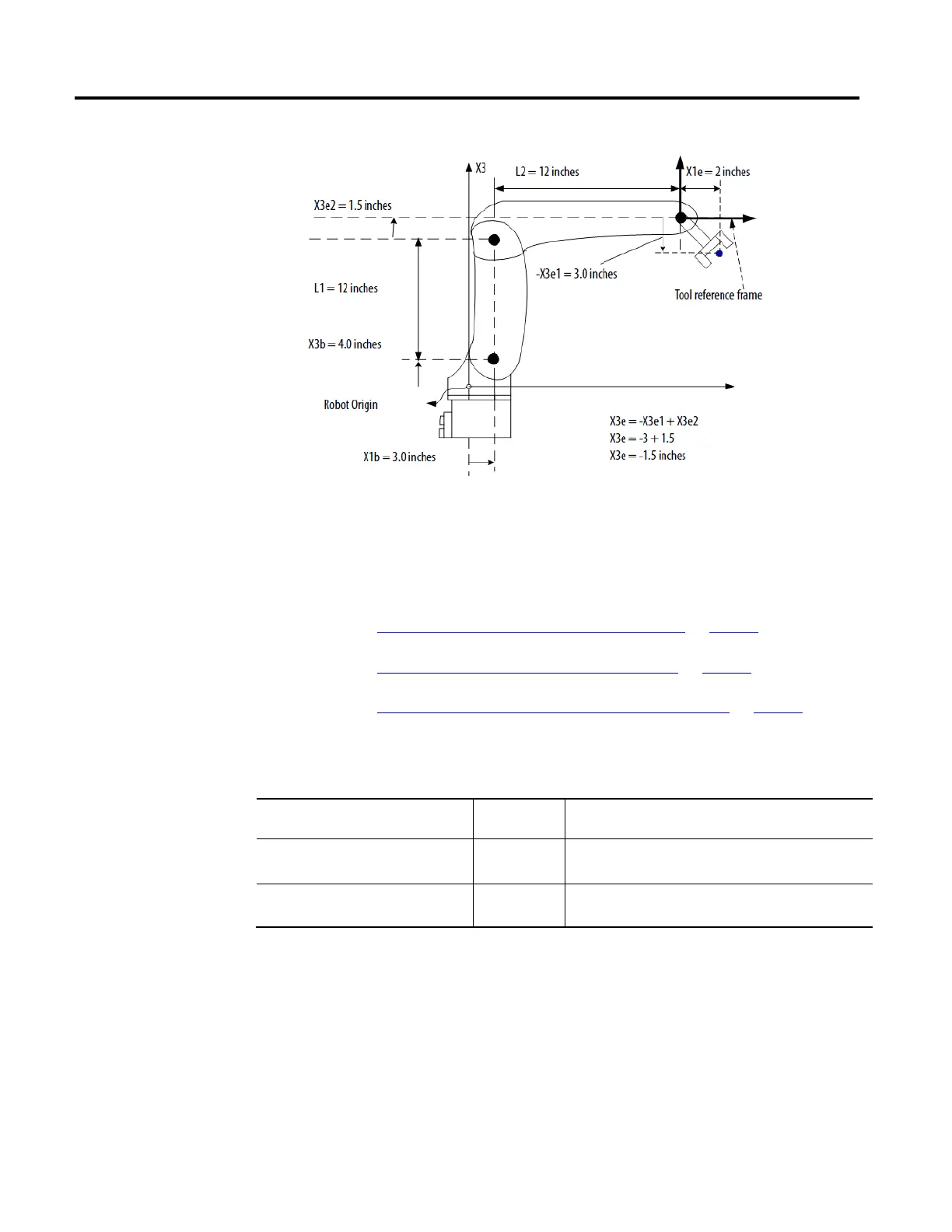
If the robot is two-dimensional, then X3b and X3e are X2b and X2e.
See also
Link lengths for Articulated Independent robot on page 72
Base offsets for Articulated Independent robot on page 73
End effector offsets for Articulated Independent robot on page 74
Link lengths are the rigid mechanical bodies attached at joints.
For an articulated independent robot with The length of Is equal to the value of the distance between
2 dimensions L1
L2
J1 and J2
J2 and the end-effector
3 dimensions L1
L2
J2 and J3
J3 and the end-effector
Link lengths for Articulated
Independent robot

 Loading...
Loading...
