Geometries with orientation support
118 Rockwell Automation Publication MOTION-UM002F-EN-P - February 2018
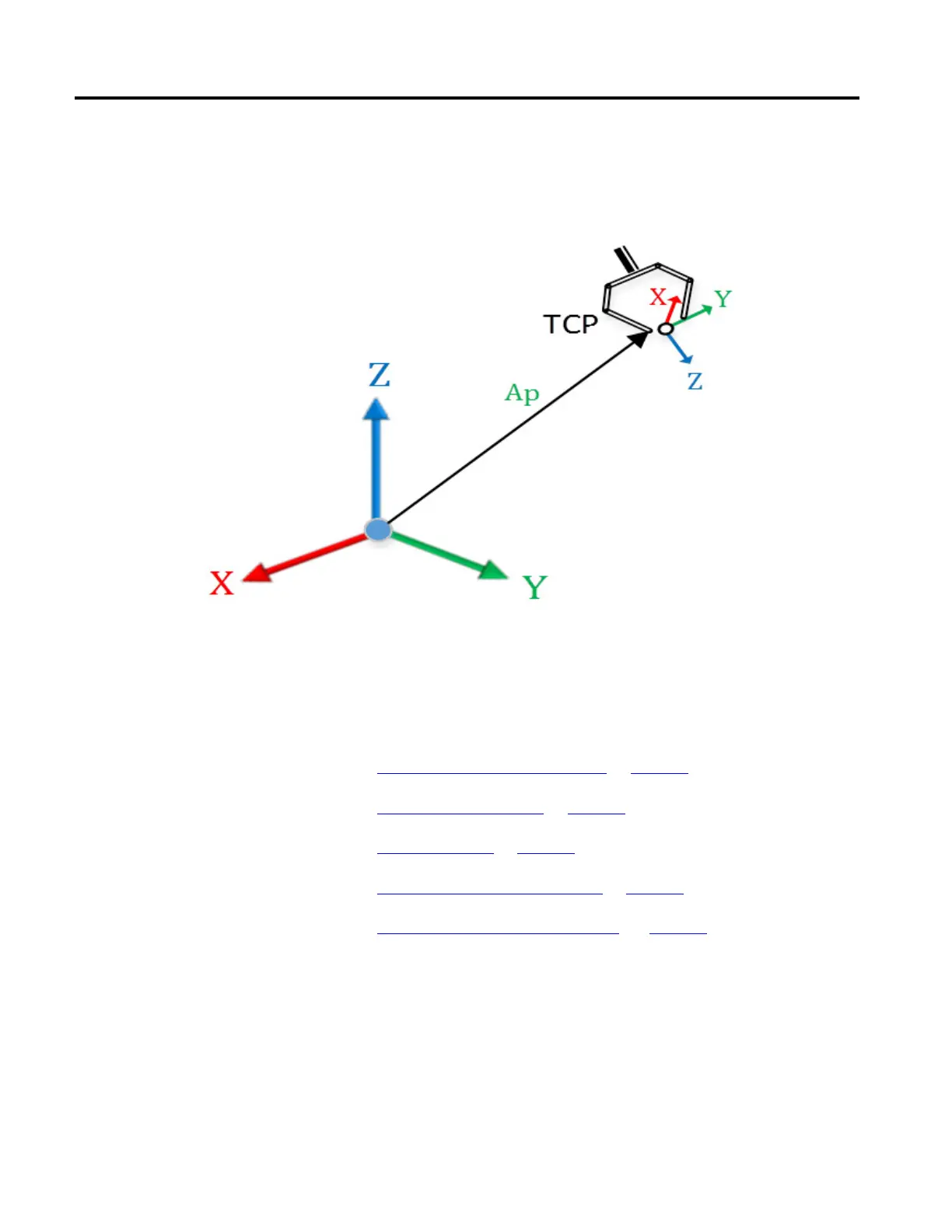
Another example is the point directly between the fingertips of a manipulator
shown in the following diagram. The orientation or pose specifies how the
manipulator is oriented. For example, one of the orientation parameters is how the
manipulator is approaching the object between the fingers.
The position and orientation explained above describe the point in space with
respect to the base frame as shown in the preceding diagram.
See also
Transform Representation of Point on page 118
Orientation Specification on page 123
Point Conversion on page 125
RxRyRz, flip, mirror flip condition on page 126
Translation and Rotation example on page 132
The mathematical forms described above to specify the points can also be used to
translate points and rotate vectors or do both. The figure above can be modified to
show the position vector and orientation frame as shown below.
Transform representation of
point

 Loading...
Loading...
