Geometries with orientation support
156 Rockwell Automation Publication MOTION-UM002F-EN-P - February 2018
See also
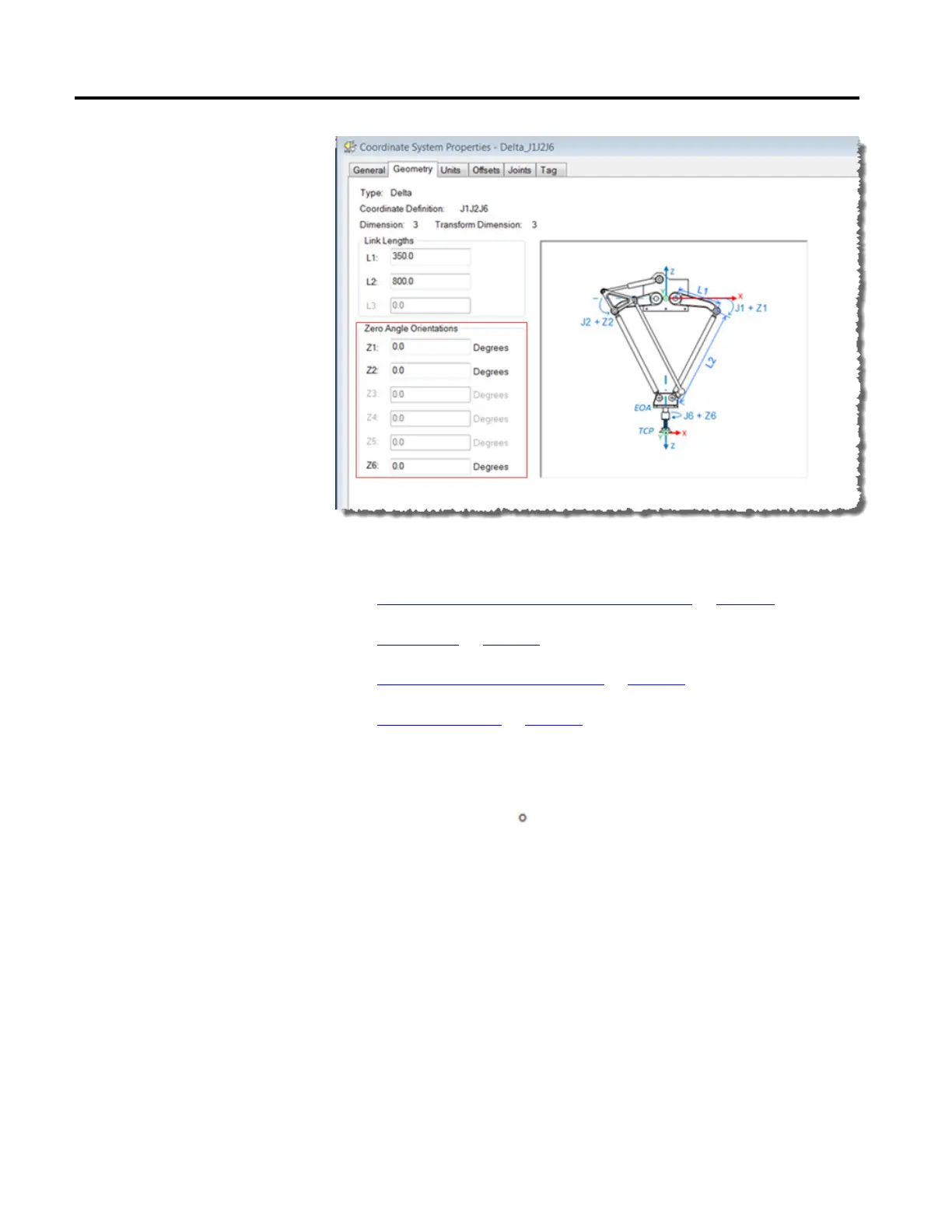
Configuration parameters for Delta J1J2J6 robot on page 151
Link lengths on page 151
Base and Effector Plate dimensions on page 152
Swing Arm Offsets on page 153
For Delta robot geometries, the internal transformation equations in the Logix
Designer application assume:
• Joints (J1, J2) are at 0
when link L1 is horizontal, parallel to XY
The work envelope is the two-dimensional region of space that defines the
reaching boundaries for the robot arm (using the default work and tool frame
settings). The typical work envelope for a Delta robot looks similar to a two
dimensional inverted umbrella, as shown in this example:
Identify the work envelope for
Delta J1J2J6 robot

 Loading...
Loading...
