8 Rockwell Automation Publication 2071-IN001F-EN-P - February 2017
Kinetix 3 Component Servo Drives
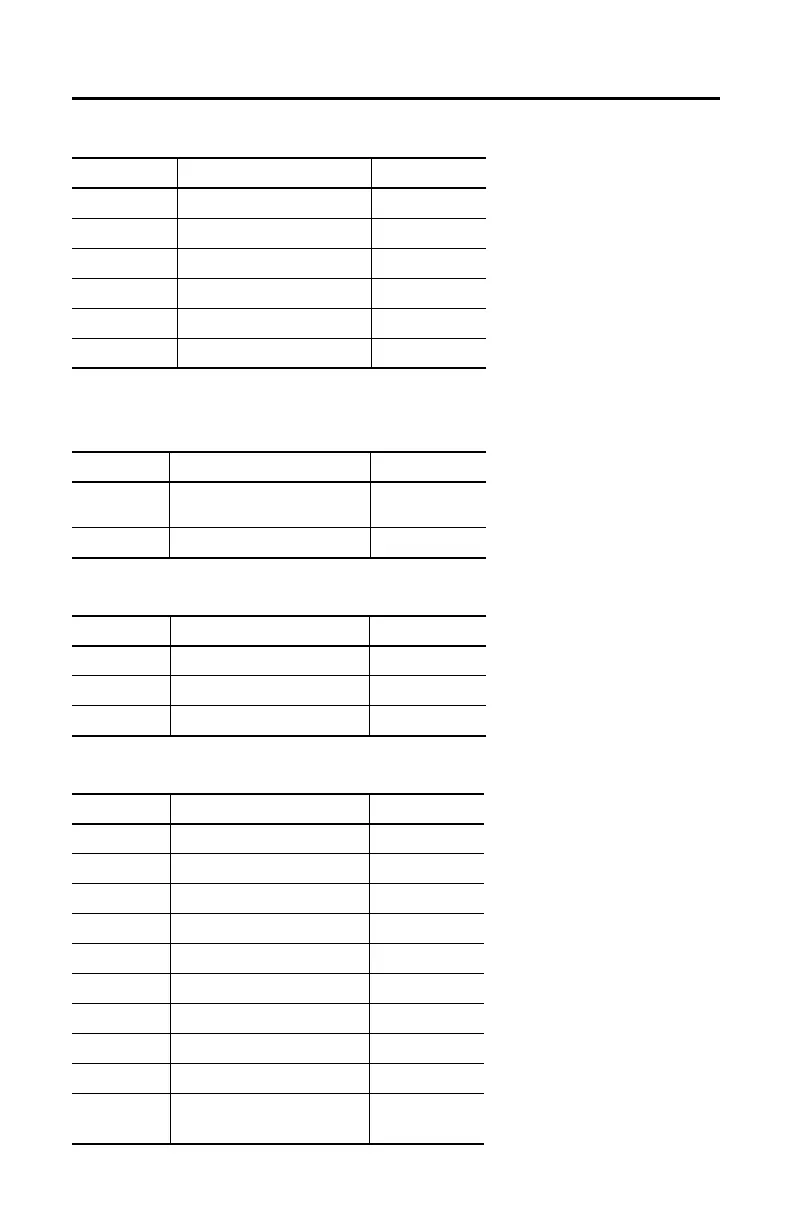
Input Power (IPD) Connector
IPD Pin Description Signal
L1 Main AC power L1
L2 Main AC power L2
L3 Main AC power
(1)
L3
L1C L1C - Control power L1C
L2C L2C - Control power L2C
DC DC bus negative DC- (not supported)
(1) L3 is not used for single phase drives.
Shunt Power (BC) Connector
BC Pin Description Signal
B1
Shunt resistor +
DC bus positive
B1
(not supported)
B2 Shunt resistor - B2
Motor-power (MP) Connector
MP Pin Description Signal
UMotor power U U
VMotor power V V
WMotor power W W
Motor Feedback (MF) Connector
MF Pin Description Signal
1 Encoder power ground ECOM
2 Thermal sensor input TS
3 A positive differential input A+
4 A negative differential input A-
5 B positive differential input B+
6 B negative differential input B-
7 Index positive differential input I+
8 Index negative differential input I-
9 Negative limit sensor input LMT-
10
Serial positive
Hall feedback S1
SD+
S1
 Loading...
Loading...







