3-44 Programming and Parameters
UTILITY
Diagnostics
220 [Motor OL Count]
Accumulated percentage of motor
overload. Continuously operating the
motor over 100% of the motor overload
setting will increase this value to 100%
and cause a drive fault.
Default:
Min/Max:
Units:
Read Only
0.0/100.0%
0.1%
047
048
224 [Fault Frequency]
Captures and displays the output speed
of the drive at the time of the last fault.
Default:
Min/Max:
Units:
Read Only
0.0/+[Maximum Freq]
0.1 Hz
225
thru
230
[Fault Speed]
See description above.
Default:
Min/Max:
Units:
Read Only
0.0/+[Maximum Freq]
0.0/+[Maximum Speed]
0.1 Hz
0.1 RPM
079
225
thru
230
225 [Fault Amps]
Captures and displays motor amps at the
time of the last fault.
Default:
Min/Max:
Units:
Read Only
0.0/[Rated Amps] × 2
0.1 Amps
224
thru
230
226 [Fault Bus Volts]
Captures and displays the DC bus
voltage of the drive at the time of the last
fault.
Default:
Min/Max:
Units:
Read Only
0.0/Max Bus Volts
0.1 VDC
224
thru
230
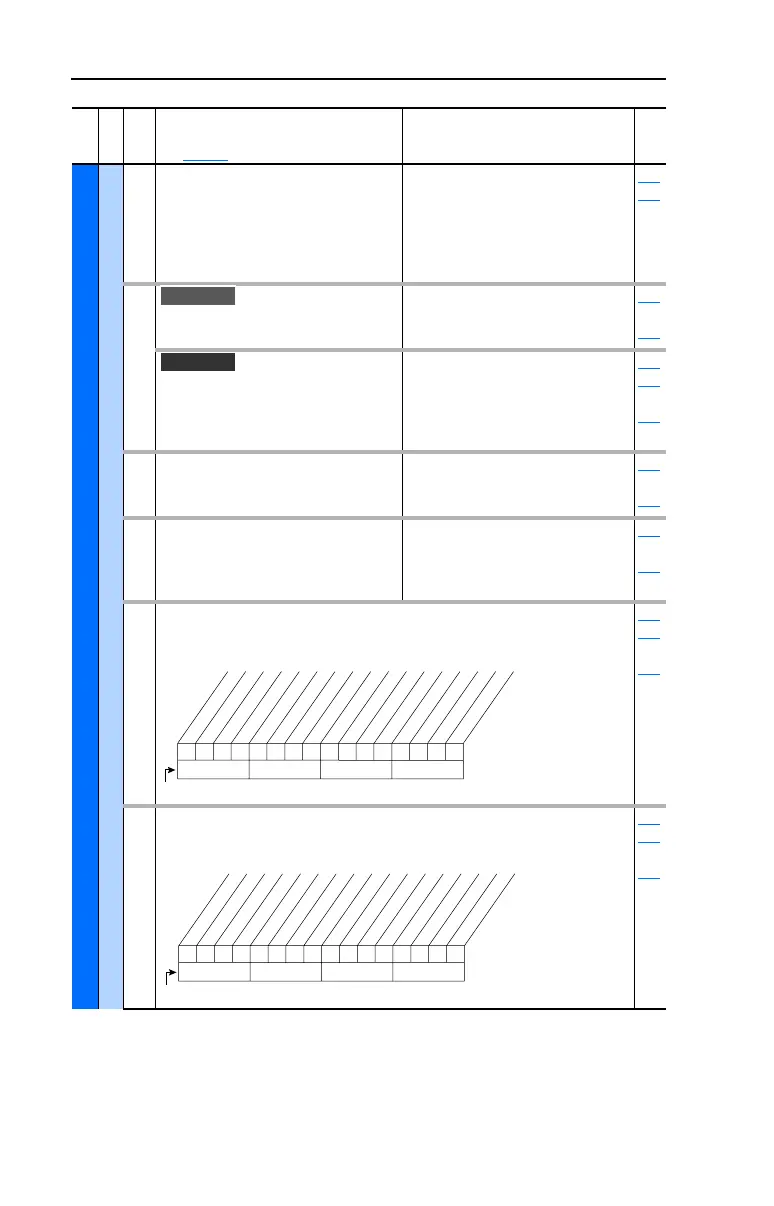
227 [Status 1 @ Fault]
Captures and displays [Drive Status 1] bit pattern at
the time of the last fault.
Read Only 209
224
thru
230
228 [Status 2 @ Fault]
Captures and displays [Drive Status 2] bit pattern at
the time of the last fault.
Read Only 210
224
thru
230
File
Group
No.
Parameter Name & Description
See page 3-2 for symbol descriptions
Values
Related
Standard
Vector
0110000101110000
10 01234567891112131415
1 =Condition True
0 =Condition False
x =Reserved
Bit #
Ready
Active
Command Dir
Actual Dir
Accelerating
Decelerating
Alarm
Faulted
At Speed
Local ID 0
Local ID 1
Local ID 2
Spd Ref ID 0
Spd Ref ID 1
Spd Ref ID 2
Spd Ref ID 3
00000000000000xx
10 01234567891112131415
1 =Condition True
0 =Condition False
x =Reserved
Bit #
Ready
Active
Running
Jogging
Stopping
DC Braking
AutoTuning
DB Active *
AutoRst Ctdn
AutoRst Act
Curr Limit
Bus Freq Reg
Motor Overld
DPI at 500 k
* Vector firmware 3.001 & later
 Loading...
Loading...












