Process PI Loop 2-123
2. [PI Control] is a set of bits to dynamically enable and disable the
operation of the process PI controller. When this parameter is
interactively written to from a network it must be done through a data
link so the values are not written to EEprom.
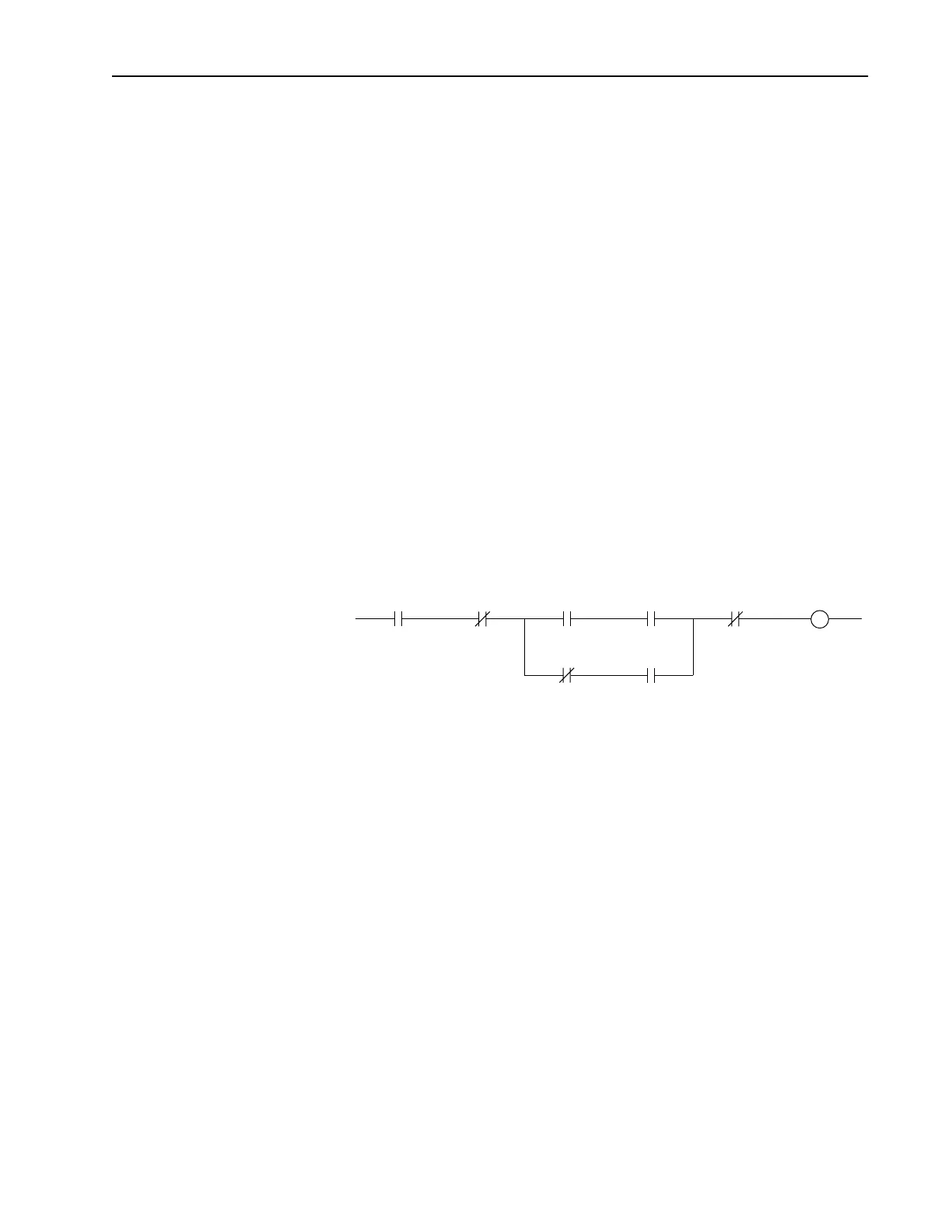
• PI Enable - The PI regulator output can be turned on/off. PI Enabled
determines when PI Output is part, or all of the commanded speed.
The logic evaluated for PI Enabled is shown in the following ladder
diagram.
The drive must be in run before PI Enabled can turn on. PI Enabled
will stay off when the drive is jogged. The PI is disabled when the
drive begins a ramp to stop.
If a digital input is configured to provide PI Enable and that digital
input is turned on then PI Enabled may turn on. Note that when a
digital input is configured to provide PI Enable that input takes
precedence over the PI Control parameter.
If a digital input is not configured to provide PI Enable and the PI
Enable bit in the PI Control parameter is turned on then PI Enabled
may turn on. If PI_Control.PI_Enable is left on all the time then the
PI may become enabled as soon as the drive goes into run. If analog
input signal loss is detected PI Enabled is turned off.
• PI Hold - The Process PI Controller has the option to hold the
integrator at the current value so if some part of the process is in limit
the integrator will maintain the present value to avoid windup in the
integrator.
The logic to hold the integrator at the current value is shown in the
following ladder diagram. There are three conditions under which
hold will turn on.
– If a digital input is configured to provide PI Hold and that digital
input is turned on then the PI integrator will stop changing. Note that
when a digital input is configured to provide PI Hold that takes
precedence over the PI Control parameter.
– If a digital input is not configured to provide PI Hold and the PI Hold
bit in the PI Control parameter is turned on then the PI integrator will
stop changing.
Stopping
PI_Status
.Enabled
DigInCfg
.PI_Enable
DigInCfg
.PI_Enable
DigIn
.PI_Enable
PI_Control
.PI_Enable
Signal LossRunning
 Loading...
Loading...











