Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018 105
MOTION_INSTRUCTION Structure
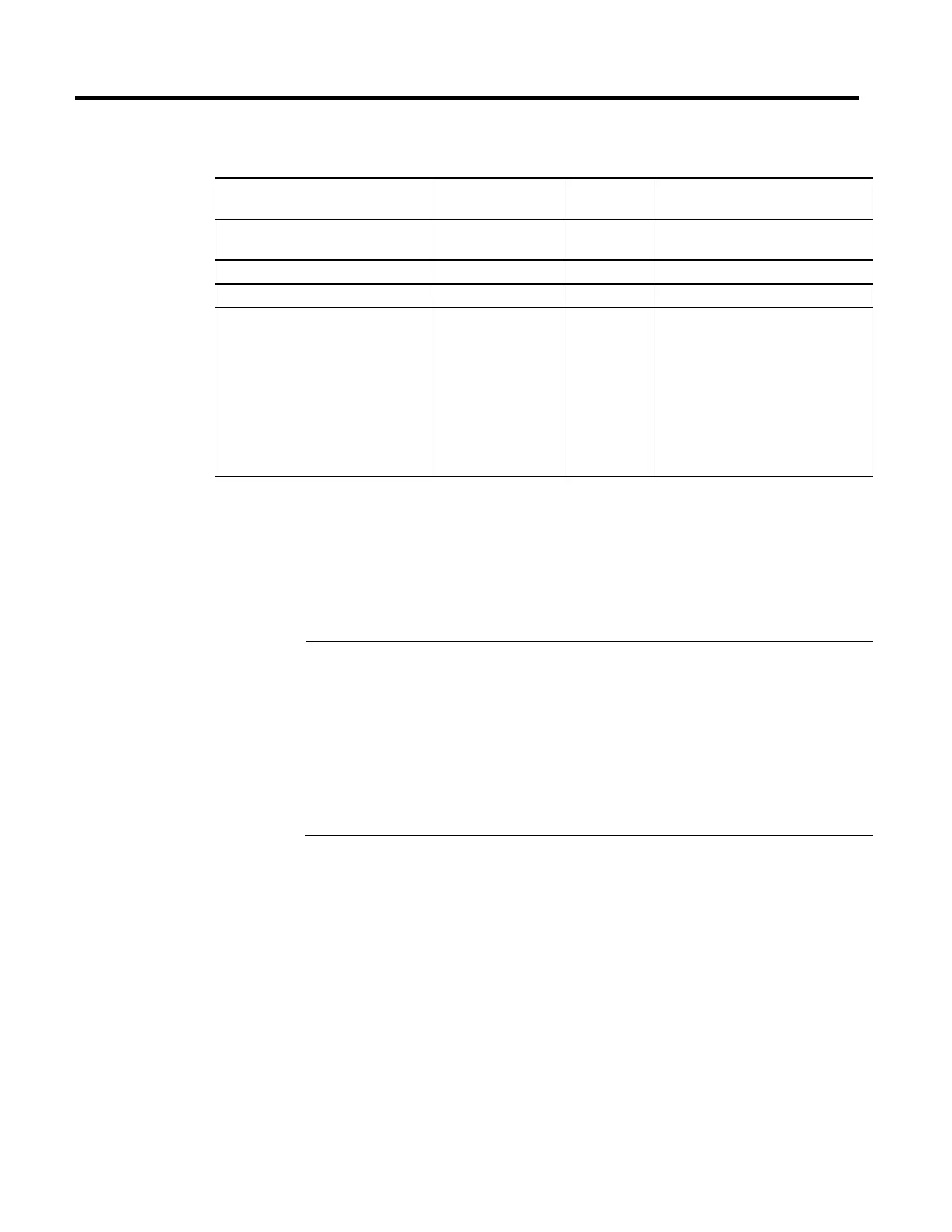
To See If Check To See If This Bit Is
Set To
Data Type Notes
A false-to-true transition caused the instruction
to execute.
EN BOOL The EN bit stays set until the process is complete
and the rung goes false.
The jog was successfully initiated. DN BOOL
An error happened. ER BOOL
The axis is jogging. IP BOOL Any of these actions stop this jog and clear the
IP bit:
• Another MAJ instruction supersedes this MAJ
instruction.
• Motion Axis Stop (MAS)instruction.
• Merge from another instruction.
• Shutdown command.
• Fault Action.
Description
Use the MAJ instruction to move an axis at a constant speed without regard to
position.
Programming Guidelines
Important:
If you change move parameters dynamically by any method, that is by changing move dynamics [Motion Change
Dynamics (MCD) instruction or Motion Coordinated Change Dynamics (MCCD)] or by starting a new instruction
before the last one has completed, be aware of the risk of velocity or end position overshoot.
A Trapezoidal velocity profile can overshoot if maximum deceleration is decreased while the move is decelerating
or is close to the deceleration point.
An S-curve velocity profile can overshoot if:
• Maximum deceleration is decreased while the move is decelerating or close to the deceleration point; or
• Maximum acceleration jerk is decreased and the axis is accelerating. Keep in mind, however, that jerk can be
changed indirectly if it is specified in % of time.
For more information, see Troubleshooting Axis Motion.
 Loading...
Loading...







