118 Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018
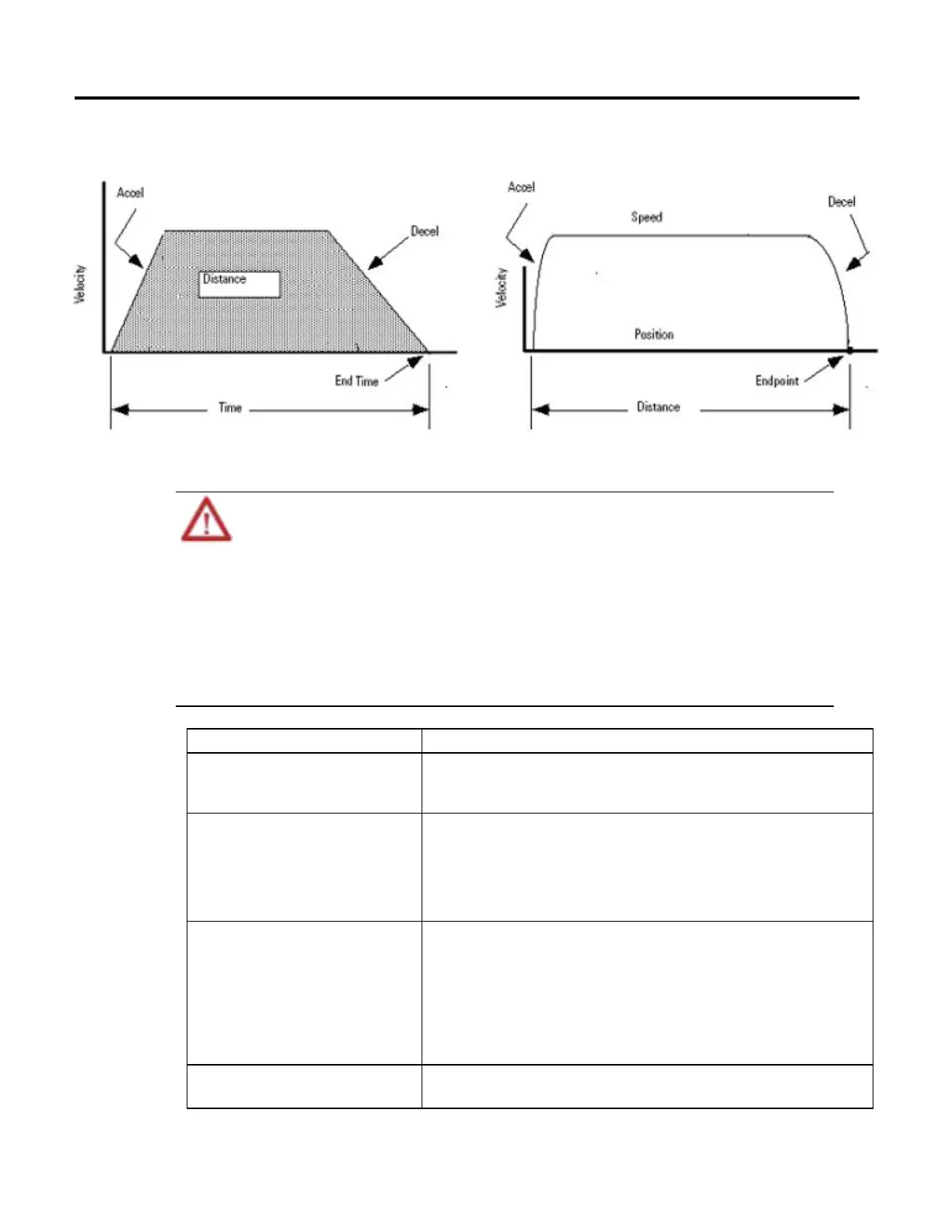
Trapezoidal Move Starting from Standstill
Programming Guidelines
Risk of Velocity and/or End Position Overshoot
If you change move parameters dynamically by any method, that is by changing move dynamics [Motion Change Dynamics (MCD)]
instruction or by starting a new instruction before the last one has completed, be aware of the risk of velocity and/or end position
overshoot.
A Trapezoidal velocity profile can overshoot if maximum deceleration is decreased while the move is decelerating or is close to the
deceleration point.
An S-curve velocity profile can overshoot if:
• maximum deceleration is decreased while the move is decelerating or close to the deceleration point; or
• maximum acceleration jerk is decreased and the axis is accelerating. Keep in mind, however, that jerk can be changed indirectly if
it is specified in % of time.
For more information, see Troubleshoot Axis Motion
Guideline Details
In ladder diagram, toggle the rung condition each
time you want to execute the instruction.
This is a transitional instruction.
In ladder diagram, toggle the rung-condition-in from cleared to set each time you want to execute the
instruction.
In structured text, condition the instruction so that it
only executes on a transition
In structured text, instructions execute each time they are scanned.
Condition the instruction so that it only executes on a transition. Use either of these methods:
• qualifier of an SFC action
• structured text construct
For more information, see Structured Text Syntax.
For a Master Offset move, enter the slave axis but
use master units.
Use an Absolute or Incremental Master Offset move to off set the master value of a position cam
without actually changing the position of the master axis. This shifts the position cam profile along the
master axis.
• For Axis, enter the slave axis.
• For Position, enter the absolute offset position or incremental offset distance
• For Speed, Acceleration, Deceleration, and Jerk, enter them for the master axis.
The instruction adds in the offset at the Speed, Acceleration, Deceleration, and Jerk values.
Use % of Time for the easiest programming and
tuning of jerk
For an easy way to program and tune jerk, enter it as a % of the acceleration or deceleration time.
For more information, see Tune an S-Curve Profile.
 Loading...
Loading...







