196 Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018
For the operands that require you to select from available options, enter your
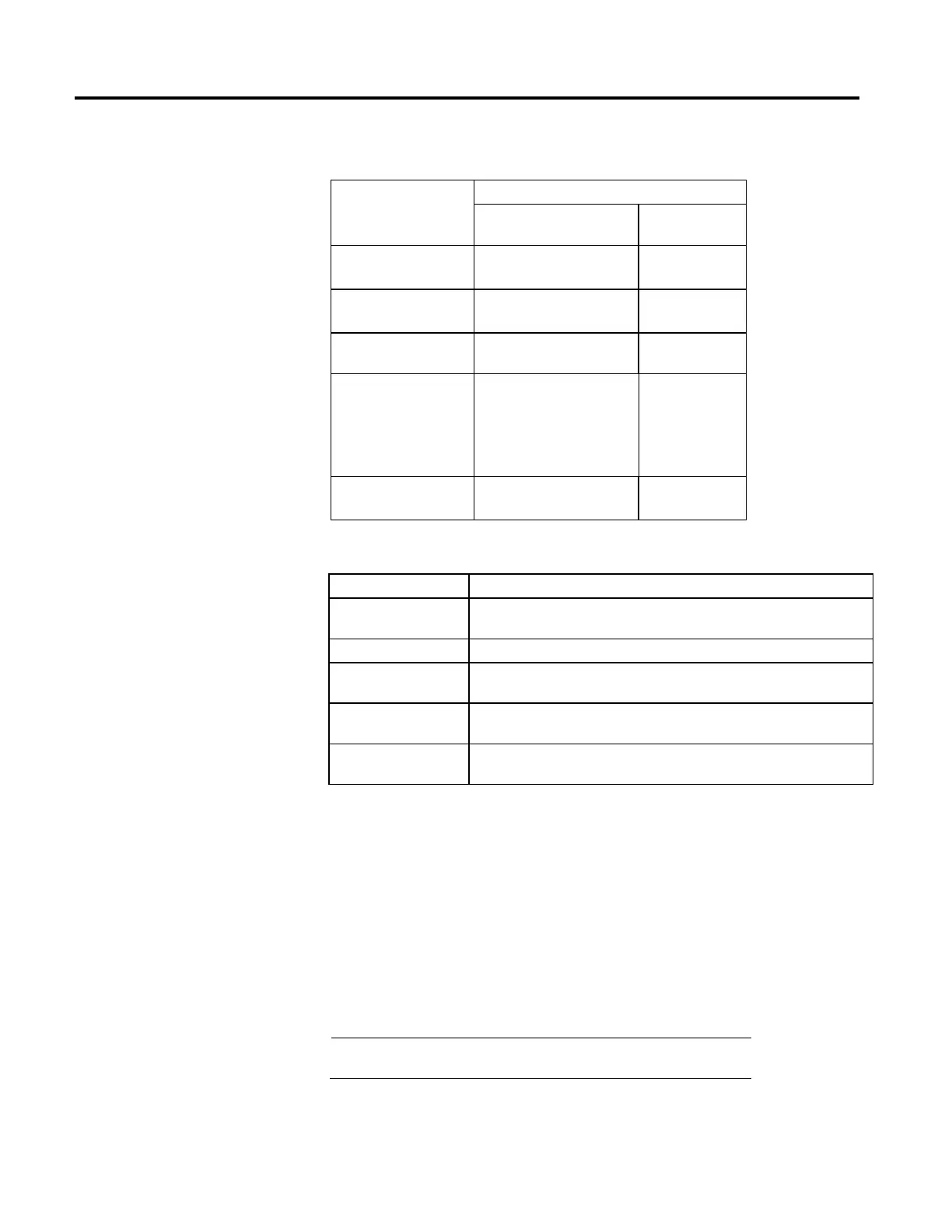
selection as:
This Operand Has These Options Which You
Enter as Text Or Enter as a
Number
ExecutionMode once
continuous
0
1
ExecutionSchedule immediate
pending
0
1
Lock Position No enumeration Immediate, Real, or
Tag
Lock Direction none
immediateforwardnly
immediatereverseonly
positionforward
positionreverse
0
1
2
3
4
Instruction Mode timedrivenmode
masterdrivenmode
0
1
MOTION_INSTRUCTION Structure
Mnemonic Description
.EN (Enable) Bit 31 The enable bit is set when the rung transitions from false-to-true and stays set until the
rung goes false.
.DN (Done) Bit 29 The done bit is set when the axis time cam instruction is successfully initiated.
.ER (Error) Bit 28 The error bit indicates when the instruction detects an error, such as if the axis is not
configured.
.IP (In Process) Bit 26 The in process bit is set on positive rung transition and cleared when terminated by a stop
command, merge, shutdown, or servo fault.
.PC (Process Complete) Bit 27 The Process Complete bit is cleared on positive rung transition and set in Once Execution
Mode, when the time leaves the time range defined by the currently active cam profile.
Description
The MATC instruction executes a time cam profile set up by a previous Motion
Calculated Cam Profile (MCCP) instruction or, alternatively, by the Logix
Designer Cam Profile Editor. Time cams provide the capability of implementing
complex motion profiles other than the built-in trapezoidal and S-curve motion
profiles provided. No maximum velocity, acceleration, or deceleration limits are
used in this instruction. The speed, acceleration, and deceleration of the slave axis
are completely determined by the designated cam profile derived from the
associated cam table.
Important:
The maximum velocity, acceleration, or deceleration limits established
during axis configuration do not apply to electronic camming.
 Loading...
Loading...







