Motion Group Instructions
Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018 215
Each axis may be configured to use any of these five stop modes. The following is a
description of the effect of each these five stopping modes as they apply to an
individual axis in the specified group.
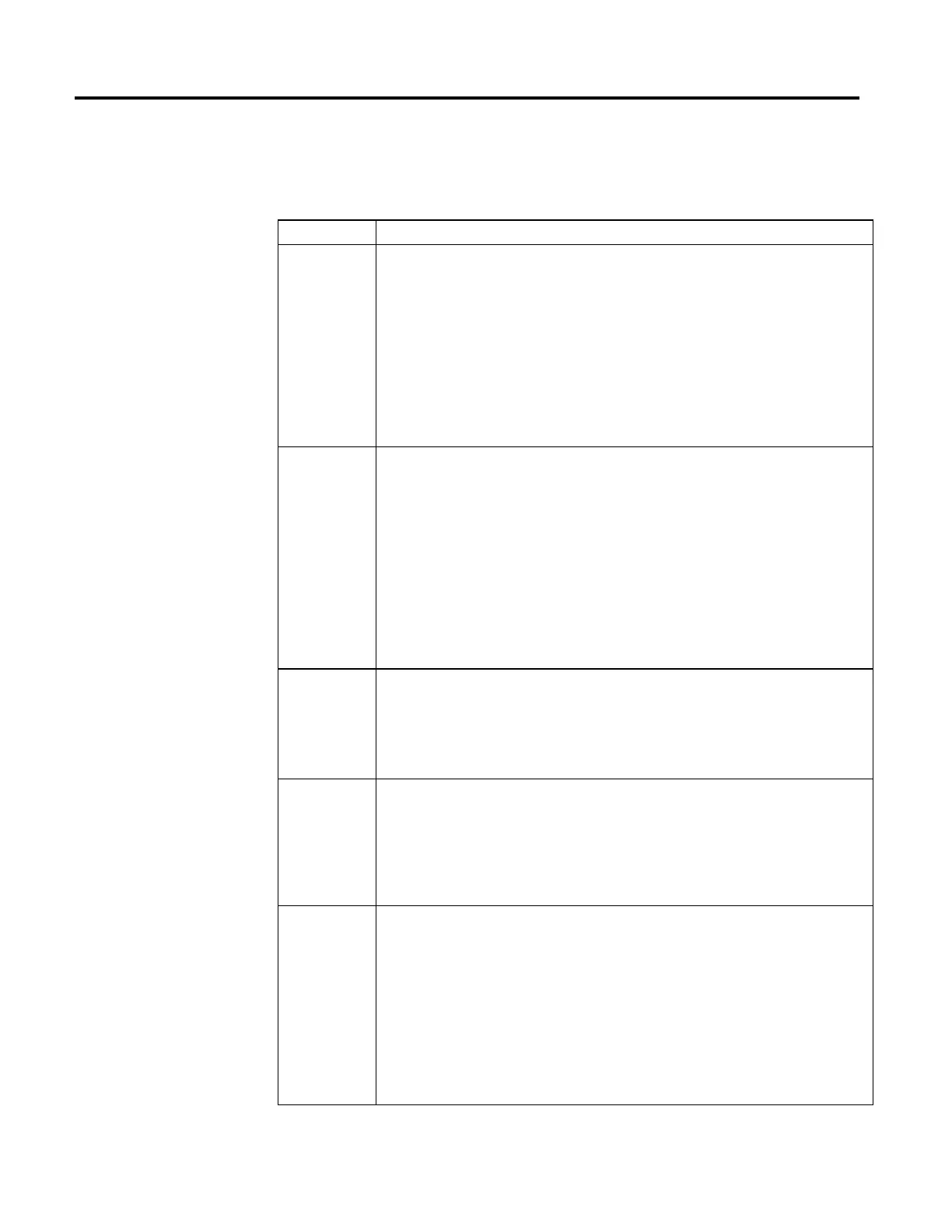
Mode Description
Fast Stop For an axis configured for a Fast Stop the MGS instruction initiates a controlled stop much like that initiated by an
MAS instruction. In this case the Motion Group Stop (MGS) instruction brings the axis motion to a controlled stop
without disabling the axis servo loop. It is useful when a fast decelerated stop the axis is desired with servo
control retained.
The MGS instruction uses the configured Maximum Deceleration of the axis to stop only the single axis motion.
The coordinated move portion of the axis uses the coordinated system configured Maximum Deceleration to stop
the axis.
If the coordinate system contains orientation axes, configured Maximum Orientation Deceleration is used to stop
orientation axes.
When a Fast Stop is used to stop a Motion Drive Start (MDS) instruction, the Direct Command feature is disabled.
Additionally, the affected axis decelerates to a stop using its ramp deceleration.
Fast Disable For an axis configured for a Fast Disable the MGS instruction initiates a controlled stop much like that initiated by
an MAS instruction with the exception that the drive is disabled when the axis comes to a stop. Use MGS when a
fast decelerated stop the axis is desired before the drive is disabled.
The MGS instruction uses the configured Maximum Deceleration of the axis to stop only the single axis motion.
The coordinated move portion of the axis uses the coordinated system configured Maximum Deceleration to stop
the axis.
If the coordinate system contains orientation axes, configured Maximum Orientation Deceleration is used to stop
orientation axes.
CIP Motion
When a Fast Disable is issued and a Direct Velocity command is issued via the MDS instruction, the CIP axis is
disabled when all planned motion is stopped. However, in this case, the drive device continues coasting or
stopping according to its Stop Action selection.
Hard Disable For an axis configured for a Hard Disable the MGS instruction initiates the equivalent of an MSF instruction to the
axis. This action immediately turns the appropriate axis drive output off, and disables the servo loop. Depending
on the drive configuration, this may result in the axis coasting to a stop but offers the quickest disconnect of drive
output power.
When a Hard Disable is used to stop a Motion Drive Start (MDS) instruction, the Direct Command feature is
disabled. Additionally, the affected axis is immediately disabled.
Fast Shutdown For an axis configured for a Fast Shutdown, the MGS instruction initiates a Fast Stop and then applies the
equivalent of a Motion Axis Shutdown (MASD) instruction to the axis. This action turns the appropriate axis driver
output OFF, disables the servo loop, opens any associated motion module’s OK contacts, and places the axis into
the Shutdown state.
When a Fast Shutdown is used to stop a Motion Drive Start (MDS) instruction, the Direct Command feature is
disabled. Additionally, the affected axis decelerates to a stop using its ramp deceleration is immediately
shutdown.
Hard Shutdown For an axis configured for a Hard Shutdown the MGS instruction initiates the equivalent of an Motion Axis
Shutdown (MASD) instruction to the axis. This action turns the appropriate axis drive output OFF, disables the
servo loop, opens any associated motion module OK contacts, and places the axis into the Shutdown state.
Depending on the drive configuration, this may result in the axis coasting to a stop but offers the quickest
disconnect of Drive power via the OK contacts.
To successfully execute a MGS instruction, the targeted group must be configured.
When a Hard Shutdown is used to stop a Motion Drive Start (MDS) instruction, the Direct Command feature is
disabled. Additionally, the affected axis is immediately shutdown.
Important: The instruction execution may take multiple scans to execute because it requires multiple coarse
updates to complete the request. The Done (.DN) bit is not set immediately, but only after the request is
completed.
 Loading...
Loading...







