Preface
26 Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018
• Sets the enable (.EN) bit.
• Clears the done (.DN) bit.
• Clears the error (.ER) bit.
• Clears the process complete (.PC) bit.
2. The controller initiates the motion process.
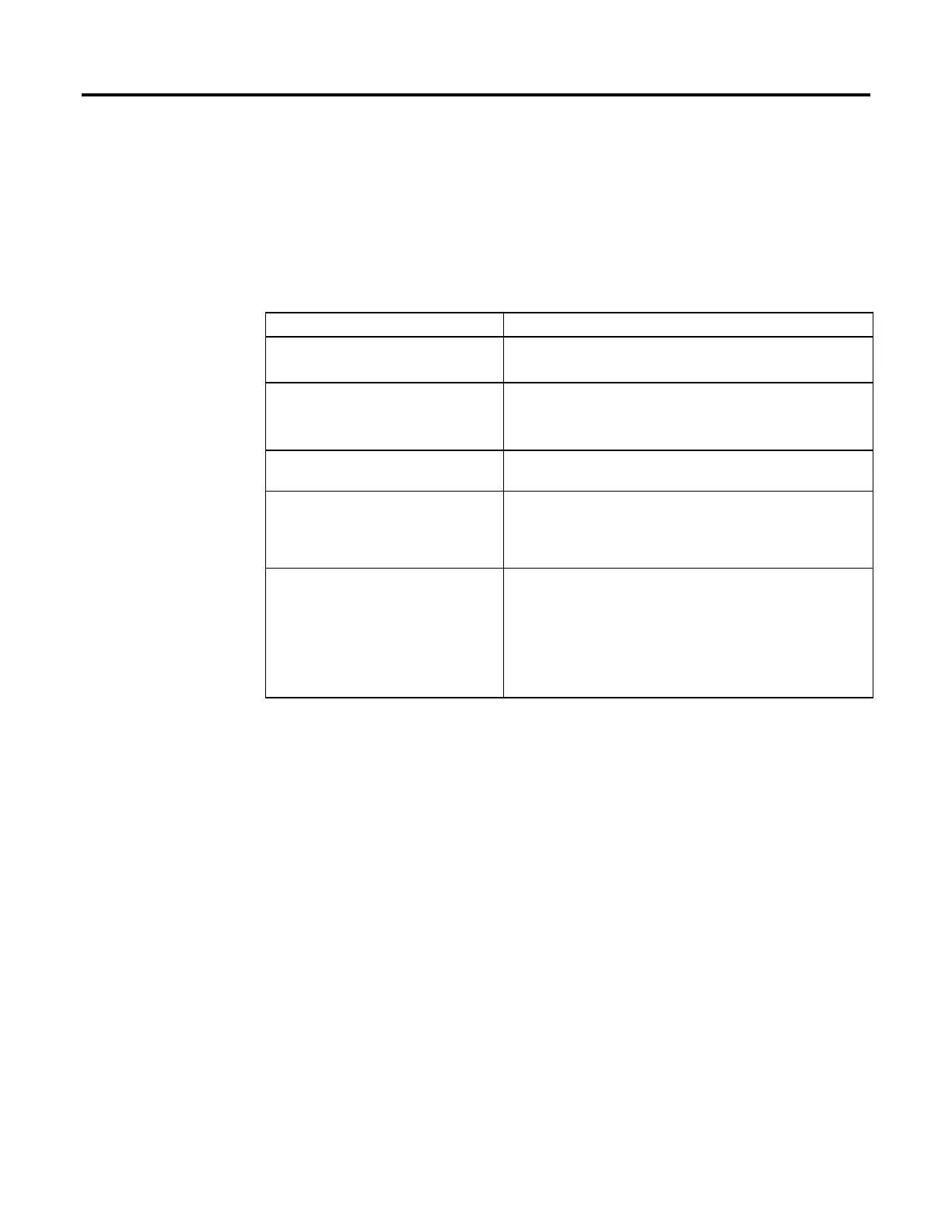
If: Then the controller:
The controller does not detect an error when the
instruction executes
Sets the .DN bit.
• Sets the in process (.IP) bit.
The controller detects an error when the instruction
executes
• Stores an error code in the control structure.
• Does not change the .IP and .PC bits.
The controller detects another instance of the motion
instruction
Clears the .IP bit for that instance.
The motion process reaches the point where the
instruction can be executed again
Sets the .DN bit.
Tip: For some process type instructions, like MAM, this will occur on the first
scan. For others, like MAH, the .DN bit will not be set until the entire homing
process is complete.
One of the following occurs during the motion
process:
• The motion process completes
• Another instance of the instruction executes
• Another instruction stops the motion process
• A motion fault stops the motion process
Sets the .DN bit.
• Sets the .PC bit.
• Clears the .IP bit.
3. Once the initiation of the motion process completes, the program scan can
continue.
Tip:
The remainder of the instruction and the control process continue in parallel with the program scan.
4. The next time the rung becomes false after either the .DN bit or the .ER bit
sets, the controller clears the .EN bit.
 Loading...
Loading...







