Motion Configuration Instructions
310 Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018
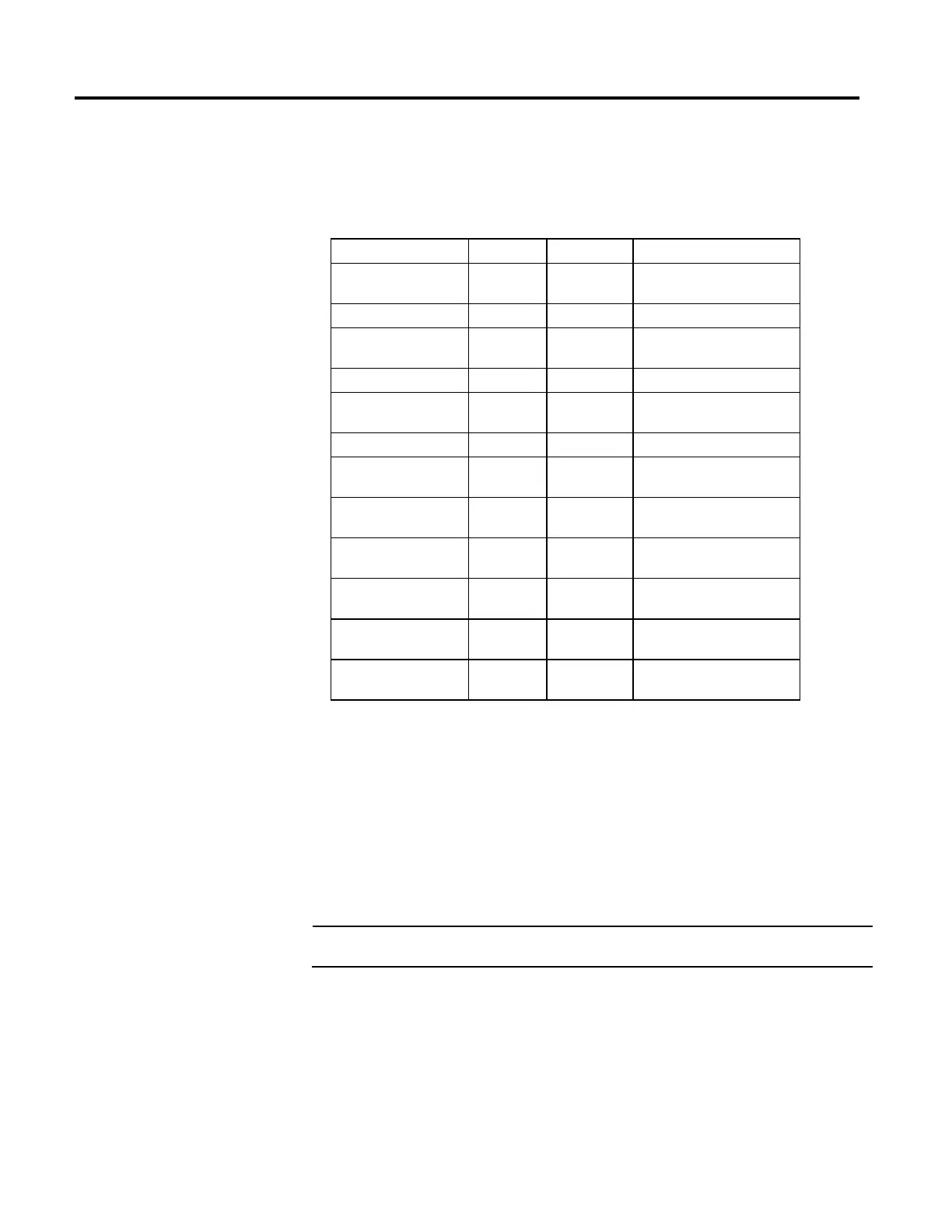
If the External Vel Servo Drive configuration bit parameter is FALSE, indicating
interface to an external torque servo drive, the following output parameters are
generated.
Axis Parameter Data Type Units Meaning
Pos Proportional Gain Real 1/msec Position Servo Loop Proportional
Gain.
Pos Integral Gain Real 1/msec
2
Position Servo Loop Integral Gain.
Vel Proportional Gain Real 1/msec Velocity Servo Loop Proportional
Gain.
Vel Integral Gain Real 1/msec
2
Velocity Servo Loop Integral Gain.
Velocity Feedforward Real - Position Servo Loop Proportional
Gain.
Acceleration Feedforward Real - Velocity Command Feedforward.
Max Speed Real pos units/sec Maximum Speed for Motion Profiles
– Set to Tuning Velocity
Max Acceleration Real pos units/sec
2
Maximum Acceleration for Motion
Profiles.
Maximum Deceleration Real pos units/sec
2
Maximum Deceleration for Motion
Profiles.
Output Filter Bandwidth Real Hertz Bandwidth of Low Pass Servo
Output Filter.
Output Scaling Real mV/KCPS
2
Scale Factor applied to output of the
Velocity Servo Loop to the DAC.
Position Error Tolerance Real pos units Maximum Servo Loop Position Error
allowed without Fault.
The output parameters generated by the MAAT instruction are immediately
applied to the specified axis so that subsequent motion can be performed.
For more information about tuning configuration parameters see Tune Status
Parameter.
To successfully execute a MAAT instruction, the targeted axis must be configured
as a Servo axis and be in the Axis Ready state, with servo action off. If these
conditions are not met, the instruction errors.
Important:
The instruction execution may take multiple scans to execute because it requires multiple coarse updates to
complete the request. The Done (.DN) bit is only set after the request is completed.
This is a transitional instruction:
• In relay ladder, toggle Rung-condition-in from false to true each time the
instruction should execute.
• In structured text, condition the instruction so that it only executes on a
transition.
 Loading...
Loading...







