Motion Configuration Instructions
326 Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018
input configuration values for the MAHD instruction. See the MRHD
instruction description for more information. MAHD requires specification of
the Diagnostic Test to apply and the Observed Direction of motion during the
previous Motion Run Hookup Diagnostics (MRHD) instruction test process.
Enter or select the Diagnostic Test and the Observed Direction and the desired
physical axis.
If the targeted axis does not appear in the list of available axes, the axis has not
been configured for operation. Use the Tag Editor to create and configure a new
axis.
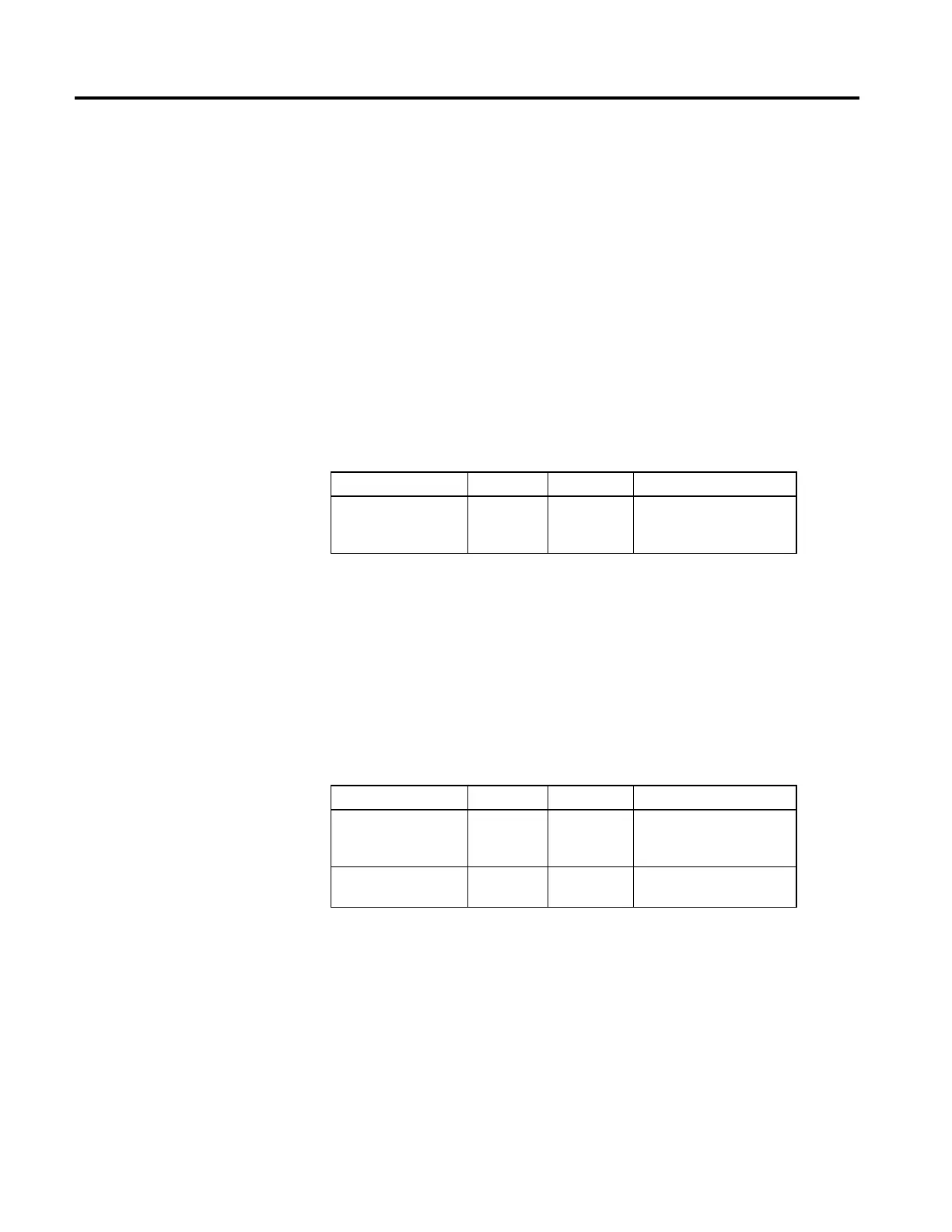
The MAHD instruction uses axis configuration parameters as input and output.
The input configuration parameters that MAHD uses are shown in the table
below. The Test Direction Forward bit is automatically established as output from
the Motion Run Hookup Diagnostics (MRHD) instruction.
Axis Parameter Data Type Units Meaning
Test Direction Forward Boolean - Direction of axis travel during
hookup test as seen by the motion
module.
Motor Encoder Hookup Test
If the Motor Encoder Test is selected, the controller computes the proper setting
for both the Encoder Polarity and the Drive Polarity based on the Observed
Direction instruction parameter and the state of Test Direction Forward bit
which was established by the output of the Motion Run Hookup Diagnostics
(MRHD) instruction. Once the Encoder Polarity and Drive Polarity settings are
computed the MAHD applies these values to the corresponding axis configuration
parameter bits as shown in the following table:
Axis Parameter Data Type Units Meaning
Encoder Polarity Negative Boolean - Inverts the sense of the encoder
feedback input to the motion
module.
Drive Polarity Negative Boolean - Inverts the sense of the DAC analog
output from the motion module.
Encoder Hookup Test
If the Encoder Test is selected, the controller computes the proper setting for just
the Encoder Polarity based on the Observed Direction instruction parameter and
the state of Test Direction Forward bit which was established by the output of the
Motion Run Hookup Diagnostics (MRHD) instruction. Once the Encoder
Polarity and Drive Polarity settings are computed, the MAHD applies these values
to the corresponding axis configuration parameter bits as shown in the following
table.
 Loading...
Loading...







