Motion Configuration Instructions
334 Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018
Test Status
Conditions may occur that make it impossible for the control to properly perform
the test operation. When this is the case, the test process is automatically aborted
and a test fault is reported and stored in the Test Status output parameter. It is
also possible to manually abort a test process using a MAS instruction which
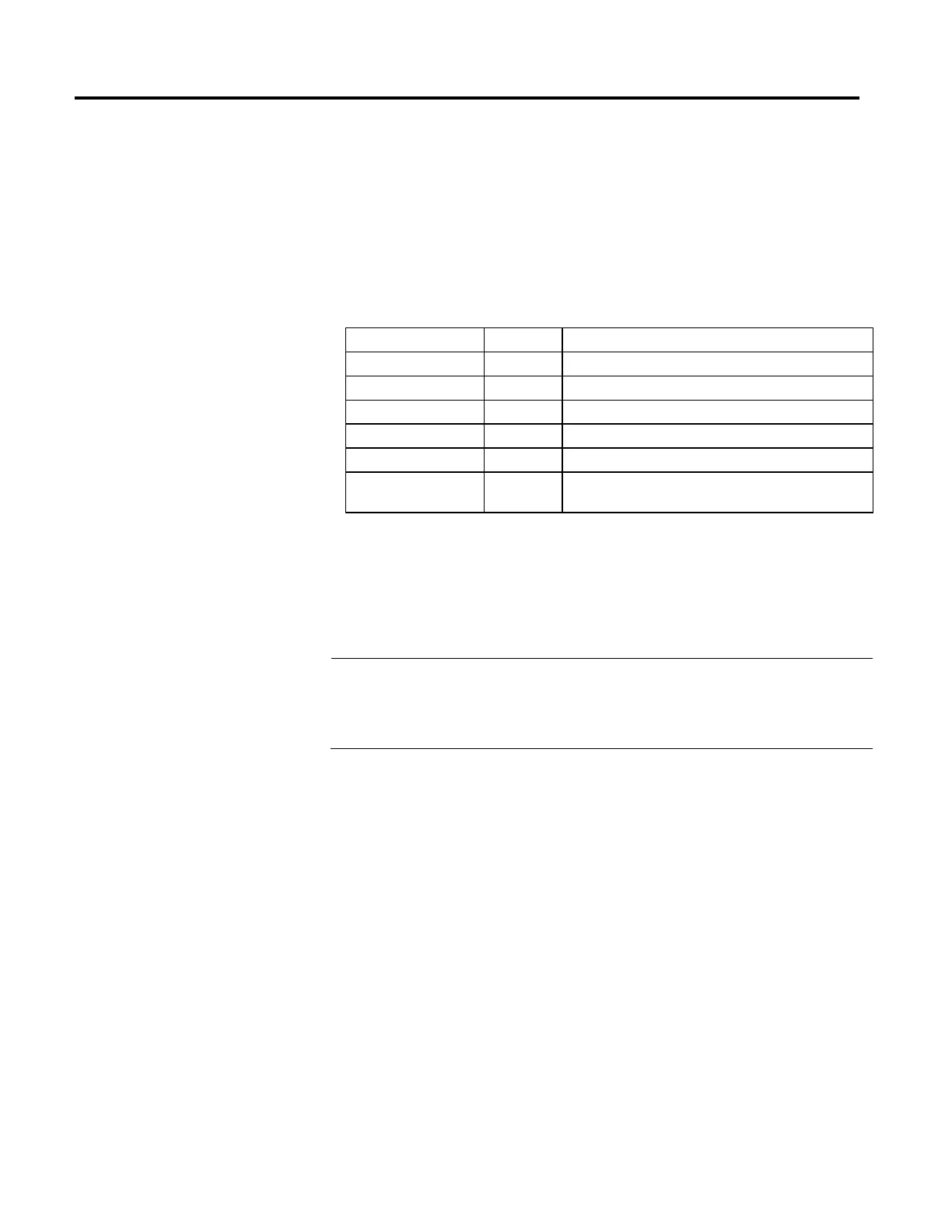
results in a test fault reported by the Test Status parameter. Possible values for
Test Status are shown in the table below:
Error Message Code Definition
Test Success 0 Test Process has been successful.
Test In Process 1 Test is in progress.
Test Aborted 2 Test Process was aborted by user.
Test Time-out 3 Test Process has exceeded timed out (2 seconds).
Test Servo Fault 4 Test Process Failed due to Servo Fault.
Test Increment Fault 5 Test Process Failed due to insufficient test increment distance to make
a reliable measure.
To successfully execute a MRHD instruction running the Motor Encoder Test,
the targeted axis must be configured as a Servo Axis Type and the axis must be in
the Axis Ready state. For other tests this instruction executes properly on either a
Servo or Feedback Only axis type. If any of these conditions are not met than the
instruction errs.
Important:
When the MRHD instruction is initially executed the In process (.IP) bit is set and the Process Complete
(.PC) bit is cleared. The MRHD instruction execution can take multiple scans to execute because it
requires transmission of multiple messages to the motion module. The Done (.DN) bit, is not set
immediately, but after these messages are successfully transmitted. The In process (.IP) bit is cleared
and the Process Complete (.PC) bit is set at the same time that the Done (.DN) bit is set.
Description - AXIS_CIP_DRIVE
The MRHD instruction is used to execute various test diagnostics on the specified
CIP axis to test the integrity and, in some cases, the polarity of servo field
connections. There are currently test diagnostics supporting drive hookup,
encoder hookup, marker hookup and motor commutation hookup. During some
of these test processes, the motion module generates output to the external drive
to produce a small amount of motion. Measurements made during some of these
hookup diagnostic tests are saved as output configuration parameters. MRHD
requires only one explicit input parameter, Diagnostic Test. Enter or select the
Diagnostic Test to run and the axis to test.
If the targeted axis does not appear in the list of available axes, the axis has not
been configured for operation. Use the Tag Editor to create and configure a new
axis.
 Loading...
Loading...







