Multi-Axis Coordinated Motion Instructions
Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018 375
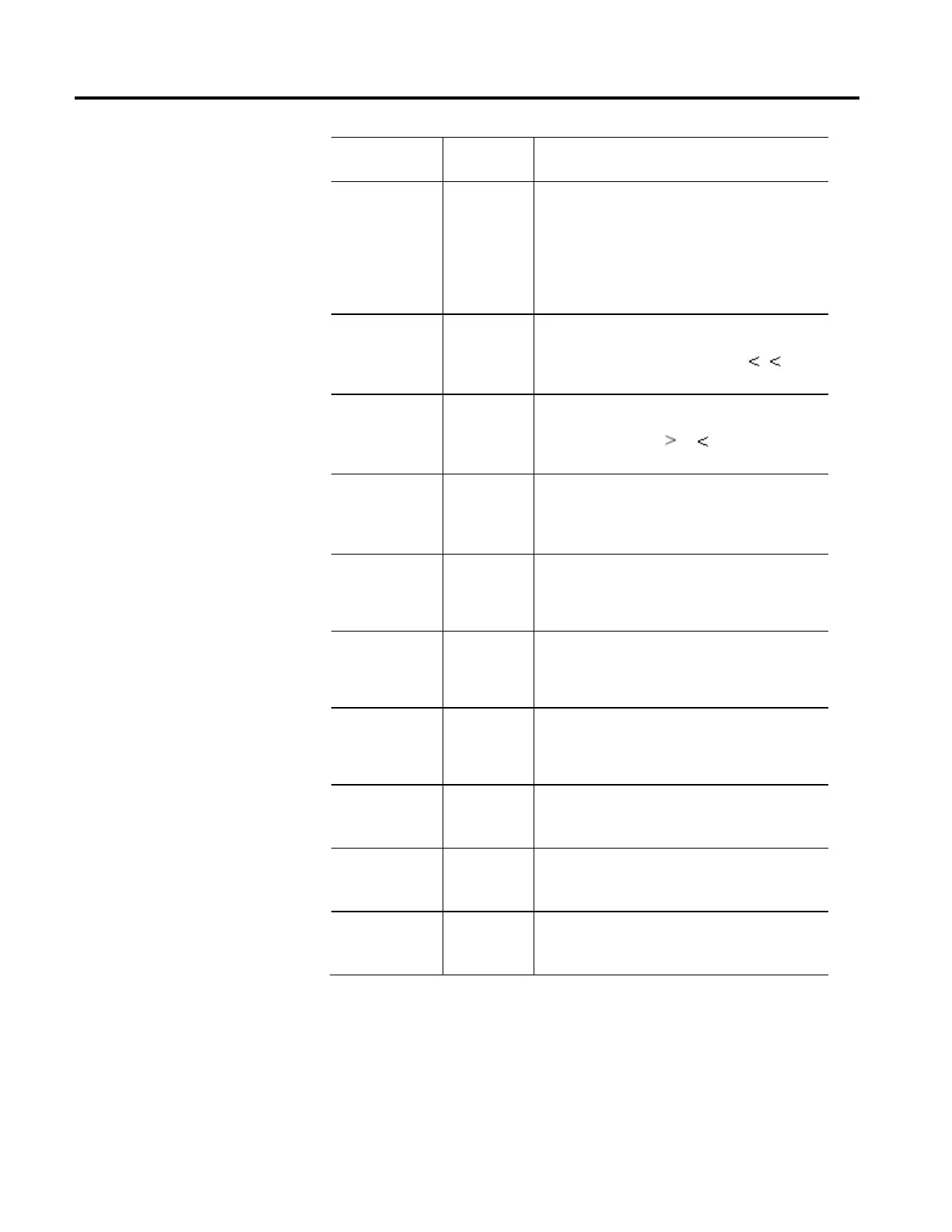
Error
Code
EX_ERROR
Code
Description
149 3-5 Orientation Axis Not Virtual
Extended error code 3 : Rx axis must be virtual if transforms are
enabled.
Extended error code 4 : Ry axis must be virtual if transforms are
enabled.
Extended error code 5 : Rz axis must be virtual if transforms are
enabled.
151 4 Joint Angle Beyond Limits
This indicates the error condition when the Joint 4 in a 5 axis Delta
goes beyond turns counter range limit (45899.99
J4 -45900)
Ext Error 4 : Joint J4 Beyond Limit
151 5 Joint Angle Beyond Limits
This indicates error condition when the Joint 5 in a 5 axis Delta
goes beyond +/-179, +179
J5 -179
Ext Error 5 : Joint J5 Beyond Limit
151 6 Joint Angle Beyond Limits
This indicates the error condition when the Joint 6 in a 4 axis Delta
goes beyond turns counter range limit (45899.99<J6<-45900)
Ext Error 6 : Joint J6 Beyond Limit
152 1 Maximum Orientation Speed Exceed for Rx
When Orientation axis Rx is commanded to move by an angle
greater than or equal to 180 degrees in one coarse update period,
this error and extended error will be returned.
152 2 Maximum Orientation Speed Exceed for Ry
When Orientation axis Ry is commanded to move by an angle
greater than or equal to 180 degrees in one coarse update period,
this error and extended error will be returned.
152 3 Maximum Orientation Speed Exceed for Rz
When Orientation axis Rz is commanded to move by an angle
greater than or equal to 180 degrees in one coarse update period,
this error and extended error will be returned.
153 1 Invalid Translation Position
MOP Invalid X Translation
Translation on X axis is Invalid
153 2 Invalid Translation Position
MOP Invalid Y Translation
Translation on Y axis is Invalid
153 3 Invalid Translation Position
MOP Invalid Z Translation
Translation on Z axis is Invalid
Example
The following examples activate the transformations between Cartesian
coordinate system CS1 and robot coordinate system CS2, which is a Delta 5 axis
geometry. In the first example, neither work frame nor tool frame are specified, so
Cartesian positions are computed at robot end-of-arm (EOA), with respect to the
robot base frame.
 Loading...
Loading...







