Multi-Axis Coordinated Motion Instructions
380 Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018
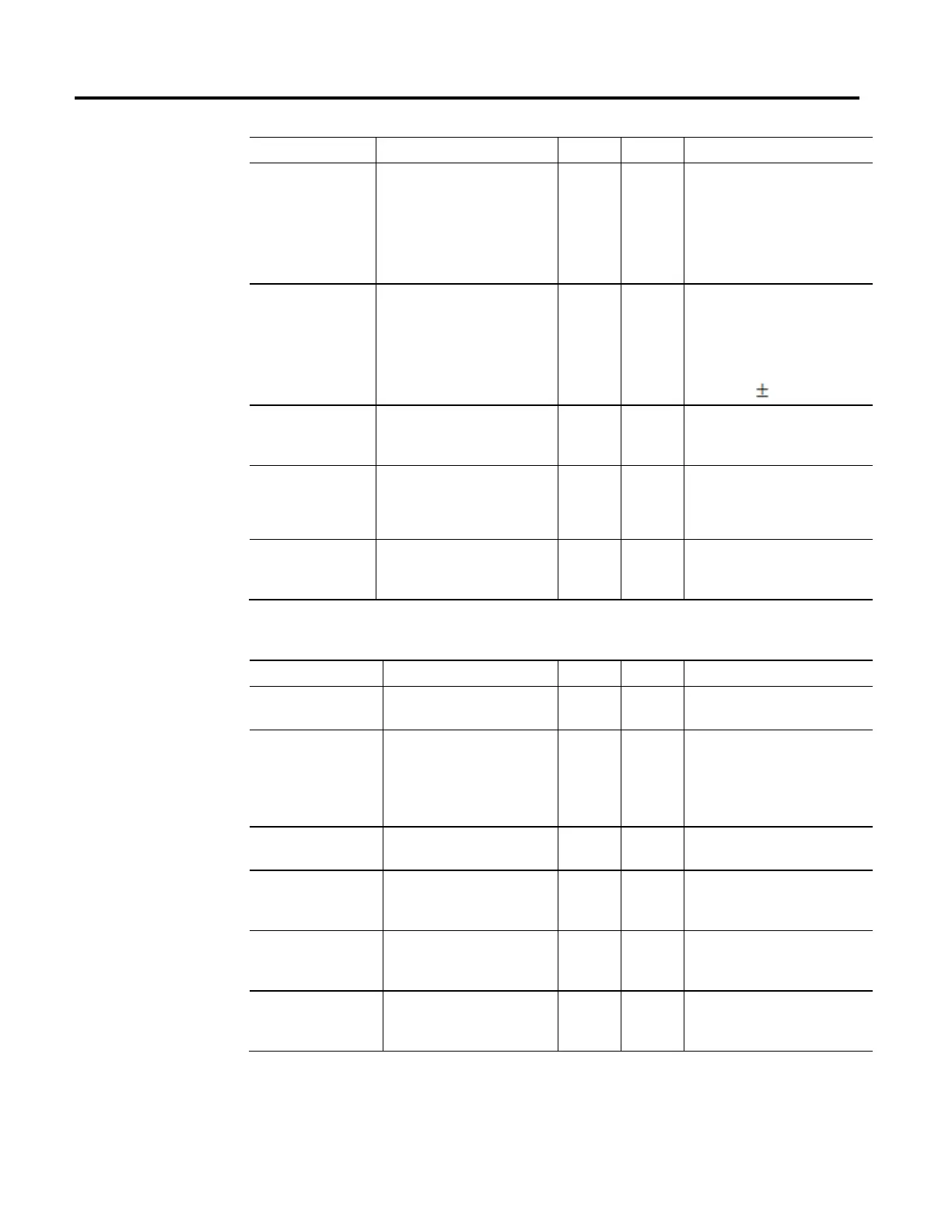
Operand Scroll, List, or Check Box Data Type Default Notes
Robot Configuration List of Bit values :
Bit0 – Robot Configuration
Change(1)/Same(0)
Bit1 – Lefty(1)/Righty(0)
Bit2 – Above(1)/Below(0)
Bit3 – Flip(1)/No flip(0)
DINT 0
Bit 0 to 3 – Applies only to Articulated
and SCARA geometries. Set to zero for
Delta geometries.
See Robot configuration in section below.
Turns Counters List of variable INT 16 [4] 0 Index 0: J1
1: J4
2: J6
3
2
Joint axes turns counters. Each integer is
a signed value ( 127).
Move Type List of Absolute (0), Incremental (1) DINT 0 Select the move type.
See the MCLM instruction for more
information on this operand.
Termination Type List of
Actual Tolerance(0),
No Settle(1)
Command Tolerance(6)
DINT 0 See the MCLM instruction for more
information on this operand.
Command Tolerance
Linear
List of constant or variable REAL 0 Used for Cartesian Primary axes position
only.
Coordination Units Linear
DYNAMICS_DATA_STRUCTURE
Operand Scroll, List, or Check Box Data Type Default Notes
Units Mode List of 0 = % of Maximum
1 = Coord Units (per)
DINT 0 See Units Mode section below.
Time
Units
List of 0 = Seconds
1 = Master Units
DINT 0 Not applicable if Percentage of Maximum
is selected as unit mode.
Applies to speed, acceleration, and
deceleration only.
See Time Units section below.
Profile List of 0= Trapezoidal
1= S-Curve
REAL 0
1
See Profile section below.
Speed List of Constant or Value REAL 0
1
% of Maximum or Coordination
Units/Time Units.
Acceleration List of Constant or Value REAL 0
1
% of Maximum or Coordination
Units/Time Units
2
.
Deceleration List of Constant or Value REAL 0
1
% of Maximum or Coordination
Units/Time Units
2
.
 Loading...
Loading...







