Multi-Axis Coordinated Motion Instructions
Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018 399
Impact of Changes to Acceleration and Deceleration Values on Motion
Profile
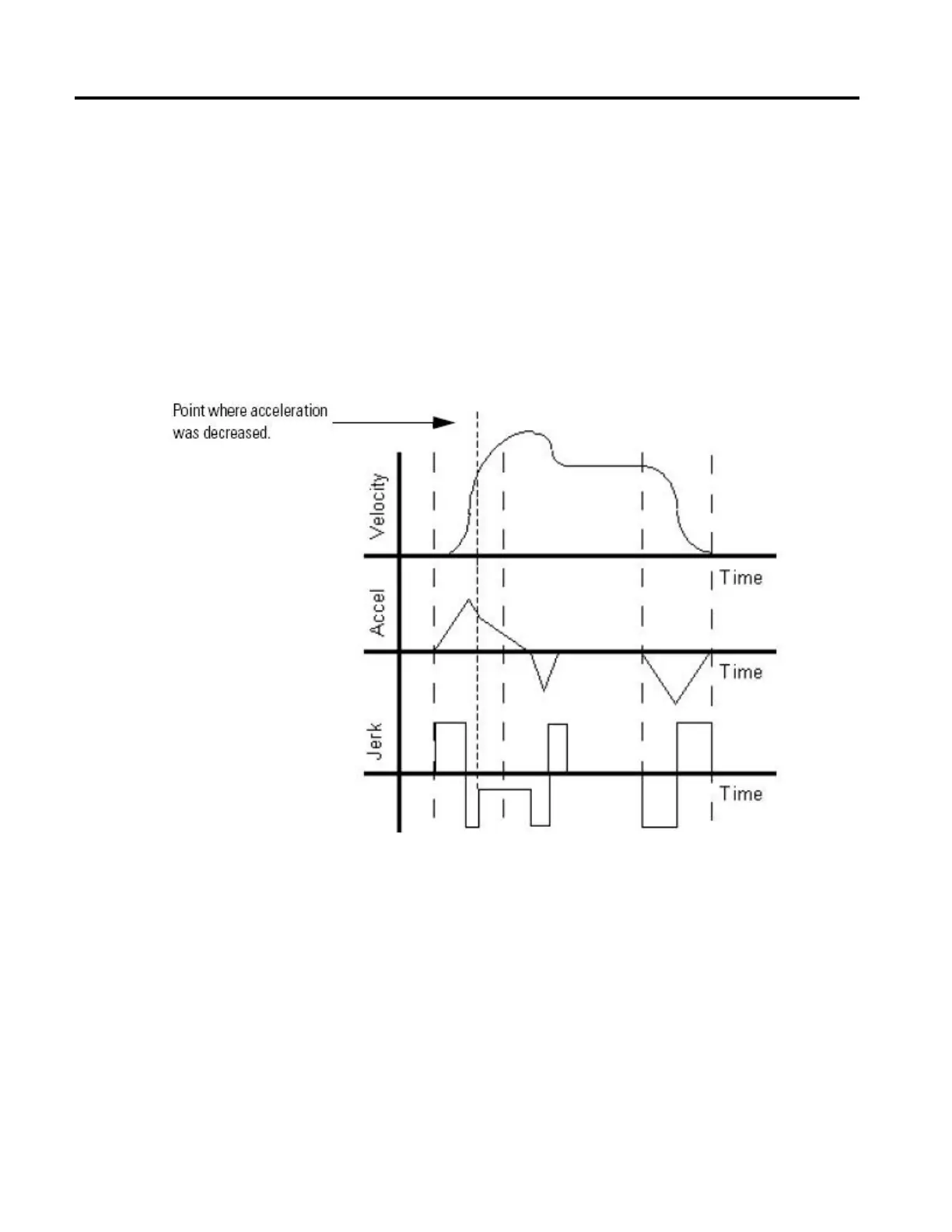
The following graph illustrates what could happen when a MCCD instruction is
used to reduce the acceleration as velocity approaches maximum. The new
acceleration Jerk Rate becomes smaller, further limiting the maximum change in
acceleration. Velocity overshoot occurs due to the additional time required for
acceleration to reach zero. Another profile is generated to bring velocity back to
the programmed maximum.
Effect of Change to Acceleration
The following graph illustrates what could happen when an MCCD instruction is
used to reduce the deceleration as velocity and position approach their target
endpoints. The new deceleration Jerk Rate becomes smaller. The time required to
decelerate to zero causes velocity to undershoot, passing through zero and
becoming negative. Axis motion also reverses direction until velocity returns to
zero. An additional profile is generated to bring position back to the programmed
target.
 Loading...
Loading...







