Multi-Axis Coordinated Motion Instructions
410 Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018
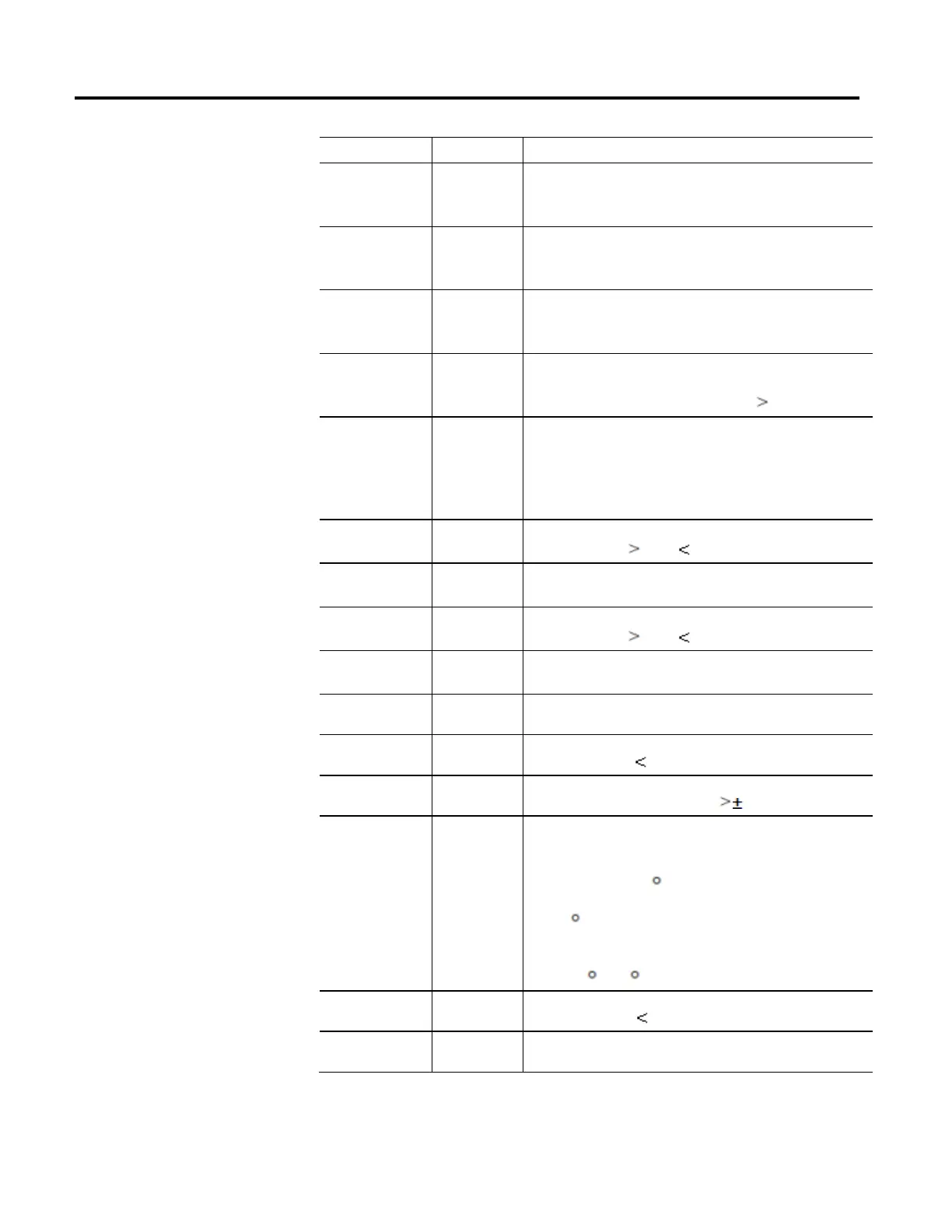
Error Code EX_ERROR Code Description
61 3 Connection Conflict
Transform Source Dimension Error
Transform dimension of the Cartesian coordinate system is < 2.
61 4 Connection Conflict
Transform Target Dimension Error
Robot coordinate system Transform Dimension is equal to zero.
61 9 Connection Conflict
Transform Axes Overlap Error
An axis is a member of both the Cartesian and Robot systems.
61 12 Connection Conflict
Transform Invalid Link Length
Link length values for any robot geometry must be 0.0 units.
61 15 Connection Conflict
Transform Invalid Delta Configuration
End Effector Offset Re must not be negative
Link length 1 + Rb – Re must be less than link length 2
(Link length 1 + Rb – Re ) must be positive or greater than zero
13 3 Value Out Of Range (base angle)
Any orientation angle
360 or -360.
13 3 Value Out Of Range (base ID)
ID equals -1.
13 4 Value Out Of Range (tool angle)
Any orientation angle
360 or -360.
13 4 Value Out Of Range (tool ID)
ID equals -1.
13 5 Parameter Out Of Range
Transform Direction.
13 6 Parameter Out Of Range
Reference pos array end
6
13 6 Parameter Out Of Range
Input position Rx, Ry, or Rz exists and value
180 degrees
13 6 Parameter Out Of Range
Operand 6
If robot geometry is Delta J1J2J6 or Delta J1J2J3J6 and if input position Rx
exists and is not equal to 180
.
If robot geometry is Delta J1J2J6 or Delta J1J2J3J6 and if input position Ry is not
equal to 0
.
If robot geometry is Delta J1J2J3J4J5 and if input position Rx exists and value is
not equal to 0
or 180 .
13 7 Parameter Out Of Range
Transform pos array end
6
13 9 Parameter Out Of Range
Any turns counter provided for the inverse transform exceeds 127 or -127 turns.
 Loading...
Loading...







