Multi-Axis Coordinated Motion Instructions
420 Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018
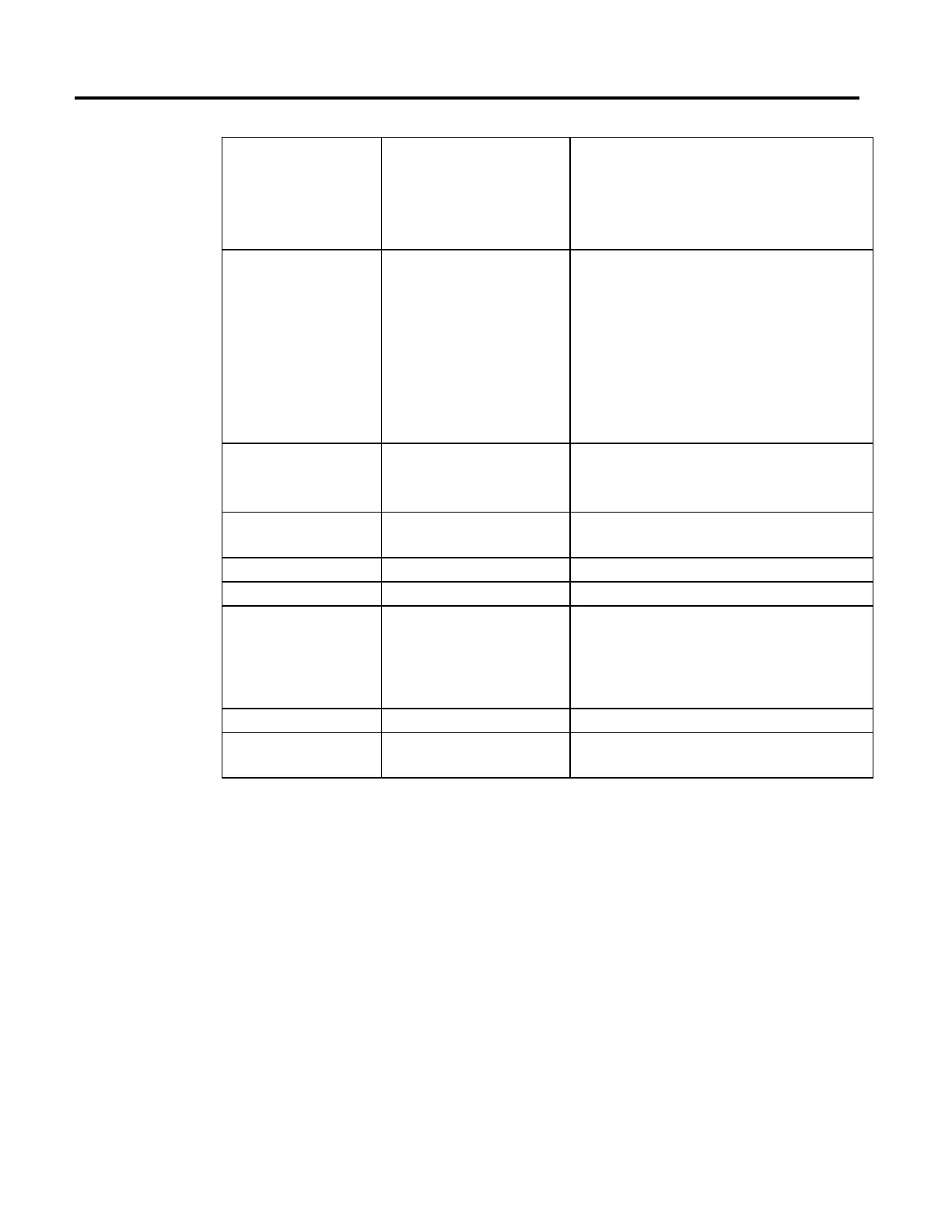
Jerk Units Unitspersec
3
%ofmaximum
%oftime
unitspermasterunit3
%oftimemasterdriven
0
1
2 (use this value to get started)
4
6
Termination Type No enumeration 0 = Actual Tolerance
1 = No Settle
2 = Command Tolerance
3 = No Decel
4 = Follow Contour Velocity Constrained
5 = Follow Contour Velocity Unconstrained
6 = Command Tolerance Programmed
See Choose a Termination Type in the Related Topics section below.
Merge disabled
coordinatedmotion
allmotion
0
1
2
Merge Speed programmed
current
0
1
Command Tolerance No enumeration Immediate or Tag
Lock Position No enumeration Immediate, Real, or Tag
Lock Direction None
immediateforwardonly
Immediatereverseonly
positionforward
positionreverse
0
1
2
3
4
Event Distance No enumeration Array
Calculated Data No enumeration Array
Coordinate System
The Coordinate System operand specifies the system of motion axes that define
the dimensions of a Cartesian coordinate system. For this release, the coordinate
system supports up to three (3) primary axes. Only the axes configured as primary
axes (up to 3) are included in speed calculations. Only primary axes participate in
the actual circular move.
 Loading...
Loading...







