Multi-Axis Coordinated Motion Instructions
450 Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018
the activation of this instruction, and will result in superimposed motion on
the affected axes.
• All Motion
Any currently executing single axis motion instructions involving any axes
defined in the specified coordinate system and any currently executing
coordinated motion instructions are terminated. The prior motion is
merged into the current move at the speed defined in Merge Speed
parameter. Any pending coordinated move instructions are cancelled.
Merge Speed
The Merge Speed operand defines whether the current speed or the programmed
speed is used as the maximum speed along the path of the coordinated move when
Merge is enabled.
Currently, Coordinated Motion only supports the queueing of one coordinated
motion instruction. Therefore the MovePendingStatus bit and the
MovePendingQueueFullStatus bit are always the same.
Additional Information On Merging Instructions
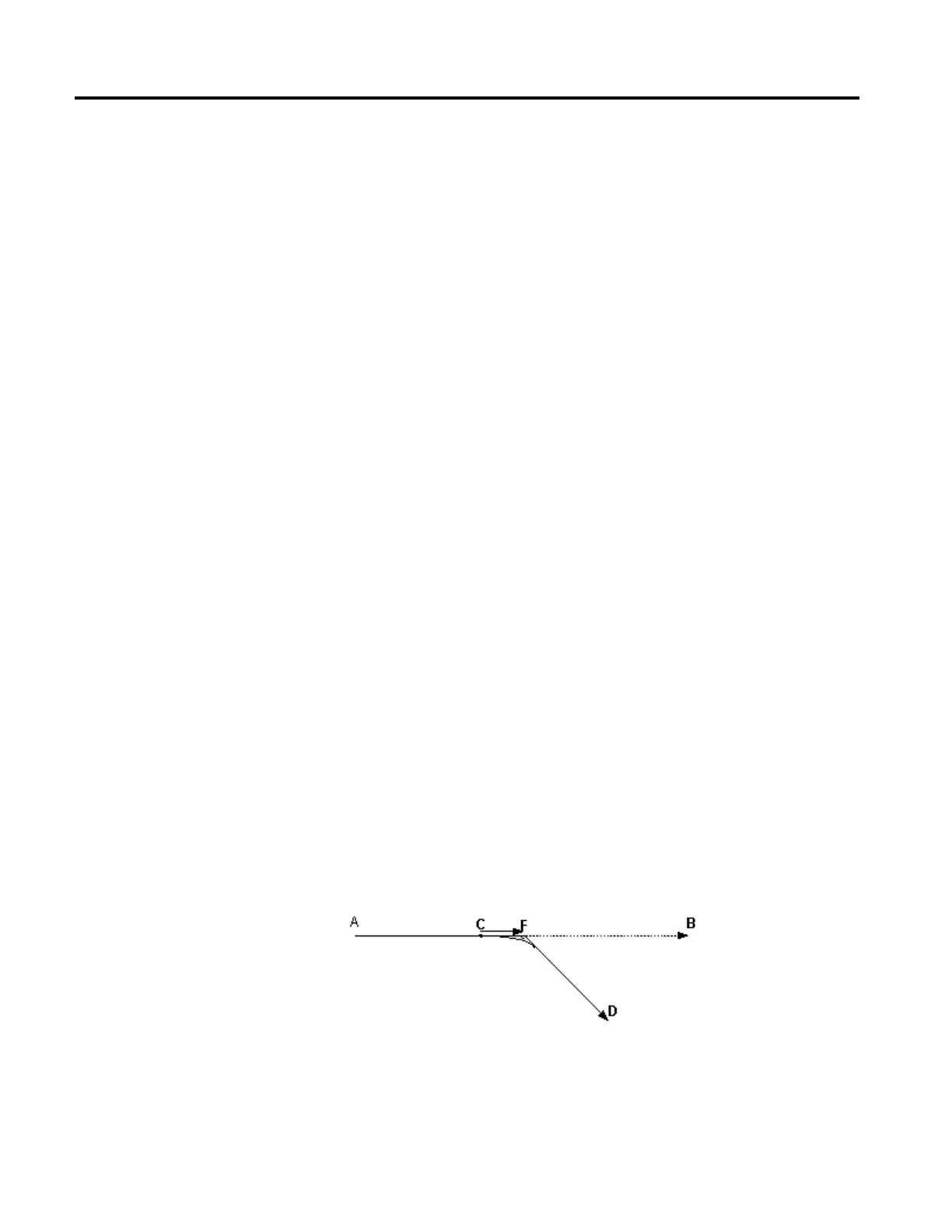
A move from point A to point B is initiated as shown in the figure below. When
the axis is at point C, a incremental merge to point D is initiated. As a result the
current instruction is terminated at point C. The control computes the
deceleration distance needed at point C along the vector AB from the current
velocity to zero velocity. This distance is shown as vector CF. The imaginary point
F is then calculated by adding the vector CF to point C. The resultant merged
motion from C to D is shown in the illustration below. The motion follows the
curved line starting from C then joins the straight line from F to D. Point D is
calculated from the original point of the merge (point C) using the incremental
data in the merge instruction. This path is identical as if the original programmed
move was made from point A to F then from F to D with a termination type of No
Decel.
This example applies to linear merges.
Attempting to merge a circular move can result in programming errors if the
resultant path does not define a circle. The circle center in incremental mode is
 Loading...
Loading...







