Multi-Axis Coordinated Motion Instructions
Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018 451
calculated from point C (the point of the merge). However, a circle must exist
from point F (the calculated end of the deceleration) to the end of the merged
move.
Merging in Incremental Mode
The Merge for coordinated motion operates differently from a merge on an
MAM. For the MCLM, any uncompleted motion at the point of the merge is
discarded. For example, assume that you have a single axis MCLM programmed in
incremental mode from a starting absolute position = 0 and with the programmed
incremental distance = 4 units. If a merge occurs at an absolute position of 1 and
the merge is another incremental move of 4 units, the move completes at a
position = 5.
If this example occurs on a MAM programmed in incremental mode, the final
position = 8.
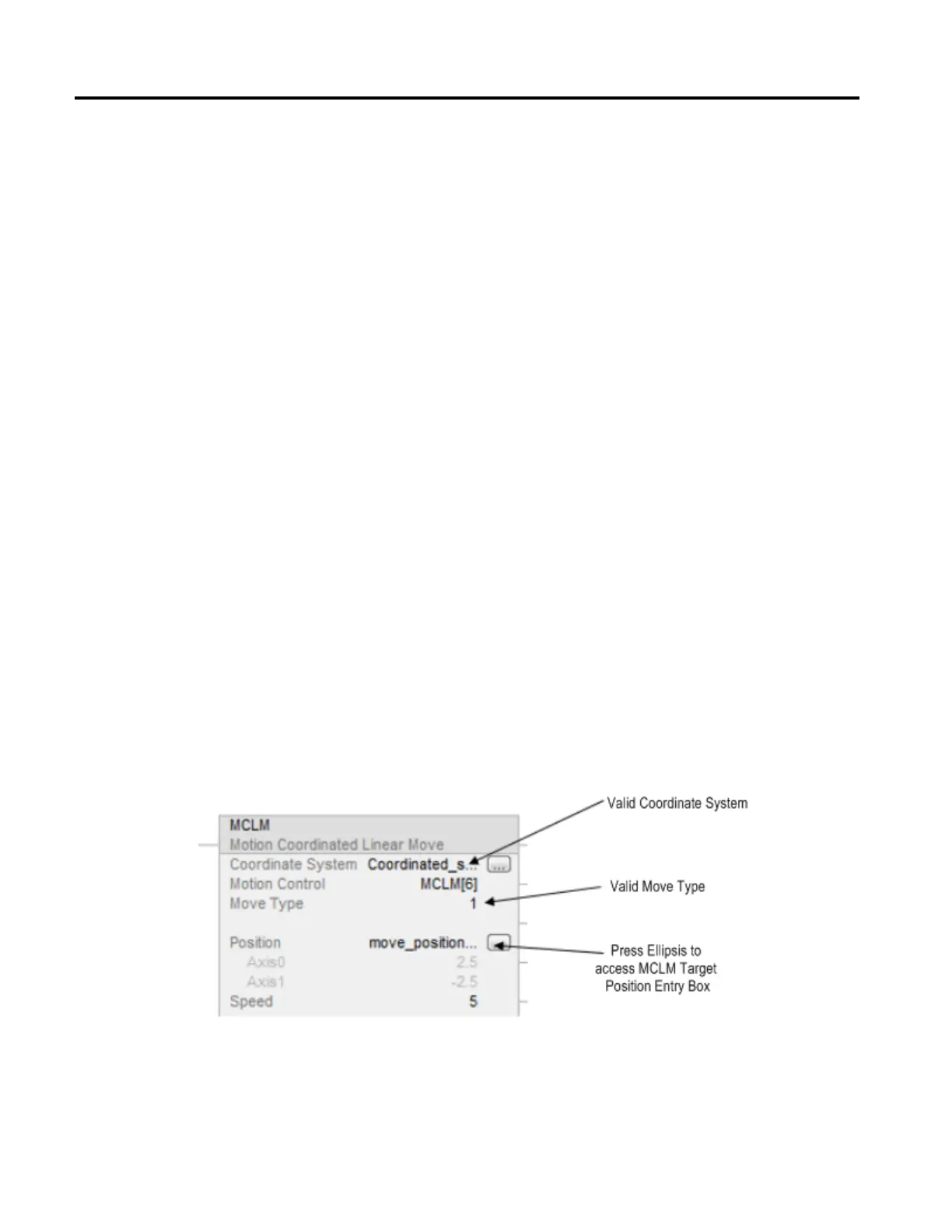
MCLM Target Position Entry Dialog
The Target Position Entry Dialog for the MCLM instruction provides an easy
format for editing Position. To gain access to the Target Position Entry dialog box
you must have inserted the name of the coordinated system into the instruction,
you must have a valid tag name entered in the position field with sufficient
elements to handle the number of axes, and you must have selected a valid Move
Type.
To access the MCLM Instruction Target Position Entry Dialog box, press the
ellipsis after the Position line on the instruction faceplate.
MCLM Ladder Valid Values for Accessing Target Position Entry Box
Pressing the ellipsis button at the Position line of the ladder instruction faceplate
calls the Target Position tab for editing the position values.
The dialog title indicates the Coordinate System and Tag Names for the
instruction.
 Loading...
Loading...







