Multi-Axis Coordinated Motion Instructions
Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018 495
Mode Returned Calculated Data Parameter
Master
Driven
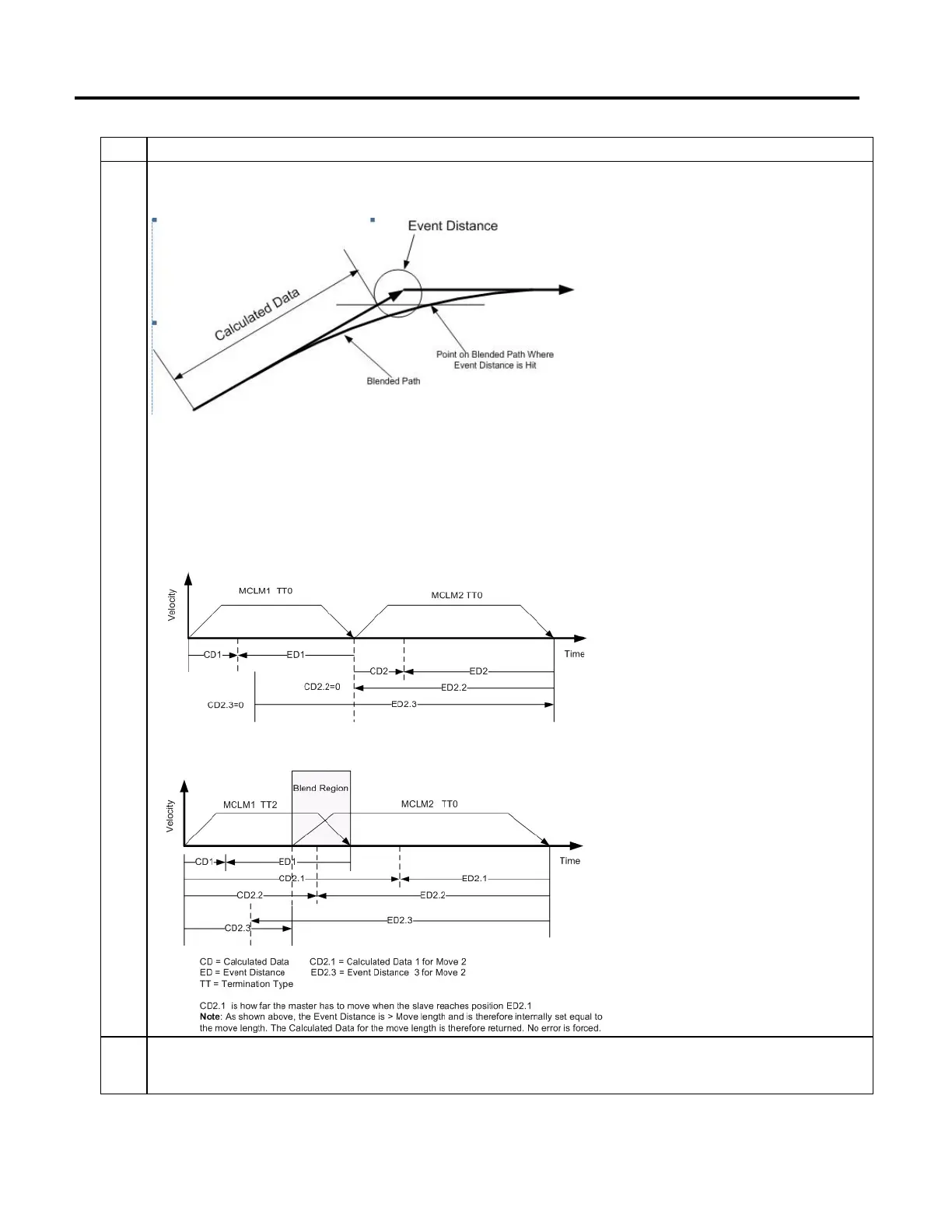
The returned Calculated Data parameter is the incremental delta Master position that is needed to make the Slave Coordinate System move from the point at which
Slave Coordinate System is locked to the Master and starts moving along the programmed path to the point where distance to go is less than the specified Event
Distance. (See Example 3 below. In example 3, the MSP for all event distances is point P0.)
• For Blended moves (that is, Termination Type =Command Tolerance or No Decel )
The incremental Master Axis distance needed for the programmed move, in the Slave Coordinate System, to travel from the beginning of the move to the Blend
Point. Note that this is where the PC bit of the instruction is set.
• For all other termination types (that is, non-blended moves)
The incremental Master Axis distance needed for programmed move, in the Slave Coordinate System, to travel from the beginning of the move to the programmed
endpoint. Note that this is where the PC bit of instruction is set on the instruction moving the slave
Another way to represent the Event Distance and the corresponding Calculated Data is on a Velocity versus Time plot as is shown in the following figure: Note that
the first plot below is for non-blended moves (TT0/1), the second is for blended (TT2, 3, 6).
Time
Driven
The returned data in the Calculated Data parameter is the total time in seconds that is needed to make the Slave Coordinate System move from the move’s start point
to a point where distance to go is less than the specified Event Distance. If the specified data in the Event Distance is array element is 0.0, then the time it takes the
entire move to complete is returned.
 Loading...
Loading...







