Motion Error Codes, faults, and attributes
562 Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018
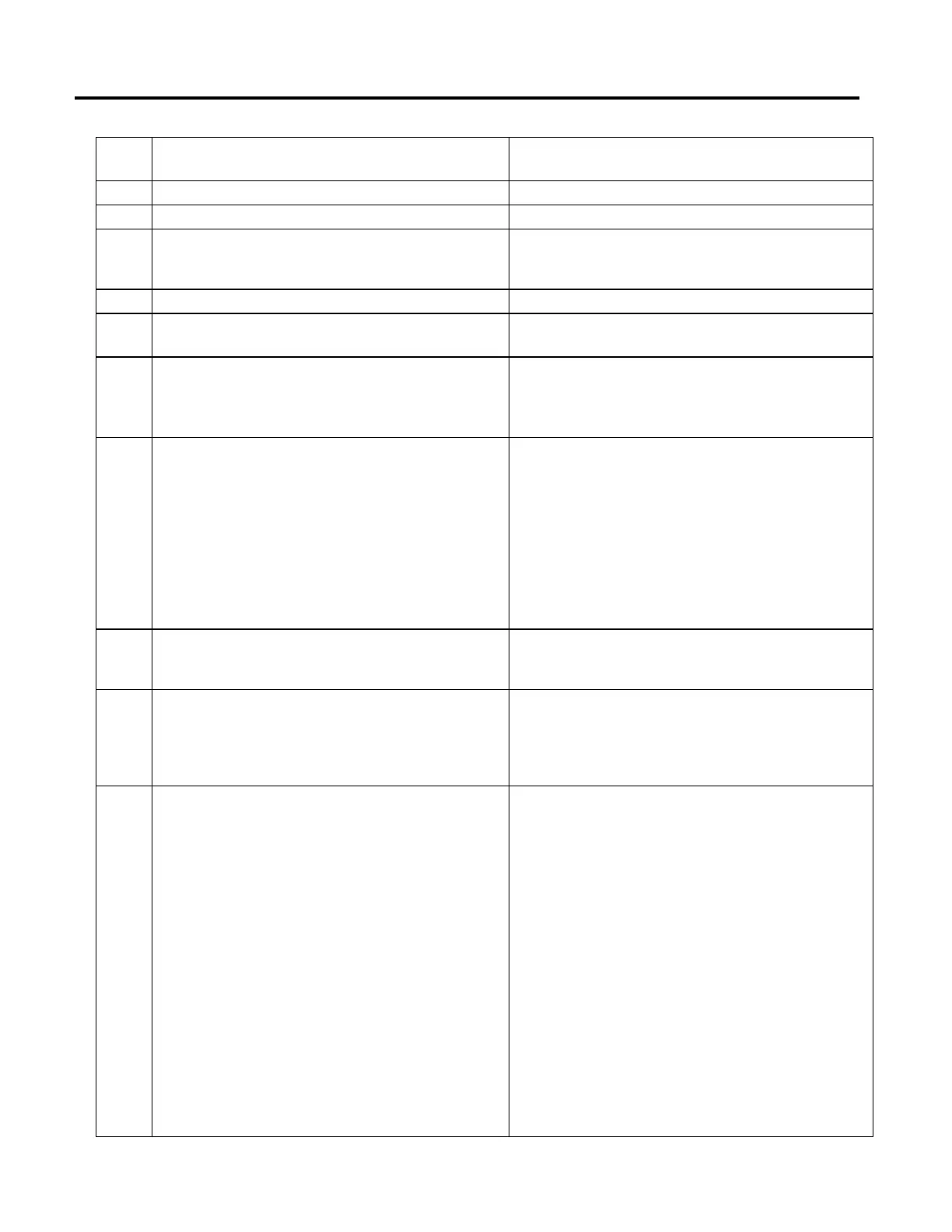
70 Look for source or target axes that are configured as rotary positioning mode.
Change them to linear positioning mode.
Axes In Transform Must Be Linear
A transform works only with linear axes.
71 Wait until the transform that you are canceling is completely canceled. Transform Is Canceling
72
Check the target positions. A calculated joint angle is beyond +/- 360
.
Max Joint Angle Exceeded
73 Check that each MCT instruction in this chain is producing valid positions. Coordinate System Chaining Error
This MCT instruction is part of a chain of MCT instructions. There is a problem with
one of the instructions in the chain.
74
Change the orientation to angles that are within +/- 360
.
Invalid Orientation Angle
75 Use this instruction only with a 1756-L6x controller. Instruction Not Supported
You can use an MCT or MCTP instruction only with a 1756-L6x controller.
76 You cannot start motion that uses an S-curve profile if the maximum
deceleration jerk for the axis is zero.
1. Open the properties for the axis.
2. On the Planner tab, enter a value for the Maximum Deceleration Jerk.
Zero Max Decel Jerk
77 How many axes are in your coordinate system?
2 — Use a non-mirror transform direction.
3 — Use a non-inverse transform direction.
Transform Direction Not Supported
You're trying to use the mirror directions with a 3-axis coordinate system and a
non-zero base offset (X2b) or effector offset (X2e).
Mirror directions are not supported for 2-axis Coordinate Systems.
You are attempting to use either a 2 or 3-axis Cartesian, Delta2D, Delta3D or
SCARA Delta target coordinate system with transform directions other than
forward and inverse.
You can use inverse mirror directions only when both these conditions are true:
You have a 3-axis coordinate system.
The base offset (X2b) and end effector offset (X2e) of the X2 dimension are zero.
78 New check for a secondary Instruction overlap on top of an active Stop
instruction.
Not Allowed While Stopping
You cannot overlap certain Motion instructions while stopping. Wait for the first
instruction to complete before starting the second instruction.
79 Home your axis again.
Error of Home instruction occurs, if any other motion on the axis is encountered
during the homing sequence.
Internal Homing Sequence Error
Invalid Planner State
If you see this error, rehome your axis in your application program. Make sure the
axis is stopped before home is attempted. If the error persists, contact Rockwell
Automation Support.
80 When referencing a Scheduled Output Module, for example, the OB16IS, make
sure that the Output operand of the MAOC references O:Data, and that the
Scheduled Output Module's communication format is set to `Scheduled Output
Data per point’.
MAOC Invalid Output Operand
If the MAOC output operand references an OB16IS Scheduled Output module, two
additional checks occur when the MAOC is initiated.
The Output operand must be referencing the beginning of the module’s output
data tag, 'O.Data'.
The communications format of the OB16IS module must be the default
"Scheduled Output Data per Point".
If either of these checks fail you see this error.
ExErr#1: Invalid Data Tag Reference - The Output operand is not pointing to the
O.Data element of the module’s output data tag. This is applicable to 5069-OB16F,
1756-OB16IEFS, 1732E-OB8M8SR, and OB16IS modules only.
ExErr#2: Invalid Module Communication Format for one of these modules:
5069-OB16F, 1756-OB16IEFS, 1756-OB16IS, 1732E-OB8M8SR modules.
ExErr#3: CIP Sync not synchronized - Scheduled output module reporting not
synchronized to a CIP Sync master. Applicable to the 5069-OB16F, 1756-OB16IEFS,
1732E-OB8M8SR modules only.
ExErr#4: Grandmaster Clock mismatch - Scheduled output module has different
Grandmaster clock than the controller. Applicable to the 5069-OB16F,
1756-OB16IEFS, 1732E-OB8M8SR modules only.
 Loading...
Loading...







