Motion Error Codes, faults, and attributes
Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018 561
65 The axis moved too far and the controller cannot store the position. To prevent
this error, Set up soft travel limits that keep the axis within the position range.
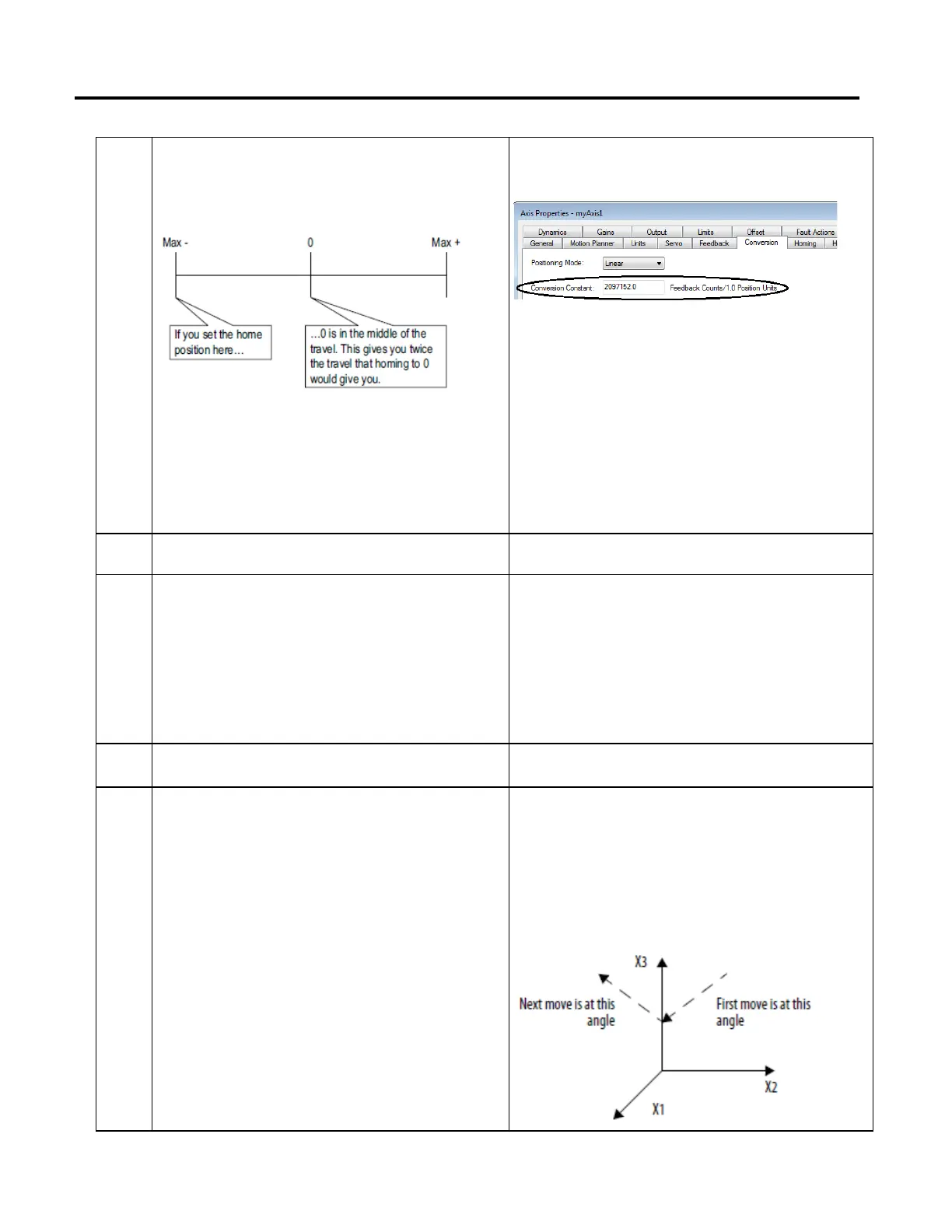
One way to get more travel is to use the max negative or max positive position as
your home position.
Example
Important: This error code does not apply to a CIP axis.
You will get this error when an absolute MAM instruction is executed when the
axis is beyond the max travel limit.
Axis Position Overflow
The range for position depends on the conversion constant of the axis.
maximum positive position = 2,147,483,647 / conversion constant of the axis.
maximum negative position = -2,147,483,648 / conversion constant of the axis.
Choose a conversion constant of 2,097,152 counts/inch. In this case:
maximum positive position = 2,147,483,647 / 2,097,152 counts/inch = 1023
inches.
maximum negative position = -2,147,483,648 / 2,097,152 counts/inch = -1023
inches.
For a motion coordinated instruction, it identifies which axis caused the error.
ExErr#1: Axis 0 Caused the Error
ExErr#2: Axis 1 Caused the Error
ExErr#3: Axis 2 Caused the Error
66 Be sure to keep the robot in the arm solution that you configured it in. You can
configure the robot in either a left arm or right arm solution.
You are attempting to fold back an articulated independent or dependent two axis
robot on itself at the quadrant boundaries.
67 Either one of these could be the reason for the error:
1. You’re trying to move to a place the robot cannot reach.
2. MCT, MCTO, MCTP or MCTPO attempted while at origin.
To avoid having the robot fold back on itself or extend beyond its reach, joint
limits are calculated internally by the firmware for Delta2D, Delta3D and SCARA
Delta robots. If you try and configure a move that violates these limits, this error
occurs.
Refer to the online help for the instruction for extended error code definitions. It
identifies which orientation axis caused the error.
Invalid Transform Position
68 Move the joints so that the end of the robot is not at the origin of the coordinate
system.
Transform At Origin
You cannot start the transform if the joint angles result in X1 = 0 and X2 = 0.
69 Check the maximum speed configuration of the joints.
Use target positions that keep the robot from getting fully stretched or folding
back on itself at the origin of the coordinate system.
Move in a relatively straight line through positions where X1 = 0 and X2 = 0.
Max Joint Velocity Exceeded
The calculated speed is very high. This happens when the robot either:
gets fully stretched.
folds back on itself.
moves away from X1 = 0 and X2 = 0 in a different angle than it approached that
position.
is configured with the wrong velocity limit.
Example: These moves produce this error.
 Loading...
Loading...







