Motion Error Codes, faults, and attributes
Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018 571
Motion Attributes
The following table lists all of the attributes associated with motion (in
alphabetical order).
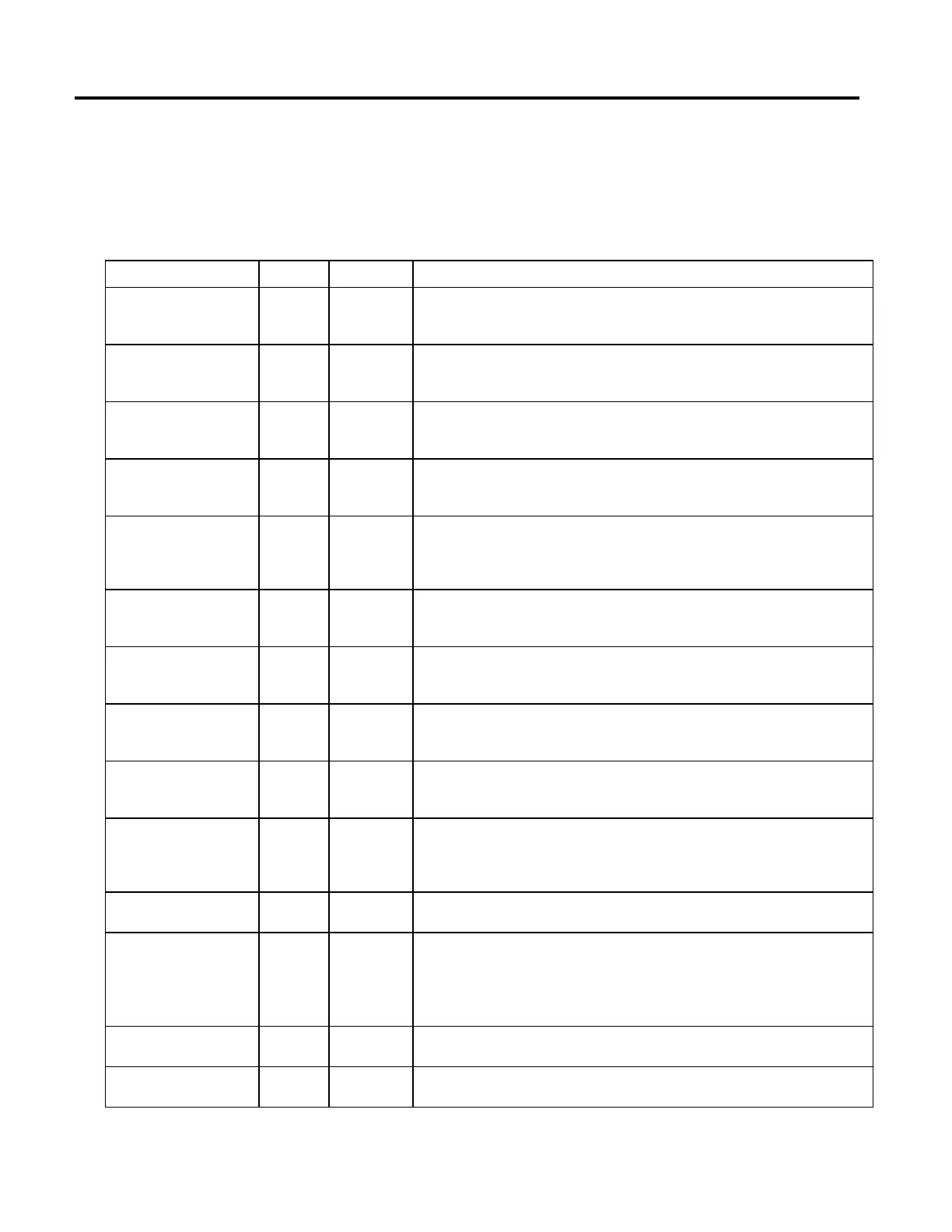
Variable: Data Type Instruction Description
AccelerationCommand REAL GSV G11/Status
The current acceleration reference to the output summing junction for the specified axis. Represents the
output of the inner velocity control loop.
AccelerationDataScaling INT GSV G10/Configuration
This advanced scaling attribute maps directly to the SERCOS IDNs. It is automatically configured to the
appropriate default, and is read-only.
AccelerationDataScalingExp INT GSV G10/Configuration
This advanced scaling attribute maps directly to the SERCOS IDNs. It is automatically configured to the
appropriate default, and is read-only.
AccelerationDataScalingFactor DINT GSV G10/Configuration
This advanced scaling attribute maps directly to the SERCOS IDNs. It is automatically configured to the
appropriate default, and is read-only.
AccelerationFeedback REAL GSV G11/Status
The actual velocity of the axis, as estimated by the servo module. It is calculated by taking the difference
in the estimated velocity over the servo update interval. Acceleration Feedback is a signed value. The sign
(+ or -) depends on the direction in which the axis is currently moving.
AccelerationFeedforwardGain REAL GSV/SSV G11/Configuration
The value used to provide the torque command output to generate the command acceleration. The
optimal value is 100%.
AccelerationLimitBipolar REAL GSV/SSV G10.Configuration
This maps directly to the SERCOS IDNs and is automatically configured to reasonable default values.
Manipulation is not needed unless motivated by a specific application requirement.
AccelerationLimitNegative REAL GSV/SSV G10.Configuration
This maps directly to the SERCOS IDNs and is automatically configured to reasonable default values.
Manipulation is not needed unless motivated by a specific application requirement.
AccelerationLimitPositive REAL GSV/SSV G10.Configuration
This maps directly to the SERCOS IDNs and is automatically configured to reasonable default values.
Manipulation is not needed unless motivated by a specific application requirement.
ActualAcceleration REAL GSV G1/Status
The current instantaneously measured acceleration of an axis. It is calculated as the current increment to
the actual velocity per coarse update interval. This is a signed value, with the sign depending on the
direction of the axis.
ActualPosition REAL GSV G1/Status
The actual position of your axis as of one coarse update period ago.
ActualVelocity REAL GSV G1/Status
The current instantaneously measured speed of an axis, calculated as the current increment to the actual
position per coarse update interval. This is a signed value, with the sign depending on the direction of the
axis.
The internal resolution limit of the actual velocity is 1 encoder count per coarse update.
AssignedGroupInstance DINT GSV G1/Interface
The instance number of the motion group that contains your axis.
ATConfigurationList DINT ARRAY
Maps directly to the SERCOS IDN, and is automatically set based on the current ServoLoopConfiguration.
This value is read-only.
 Loading...
Loading...







