Motion Error Codes, faults, and attributes
Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018 601
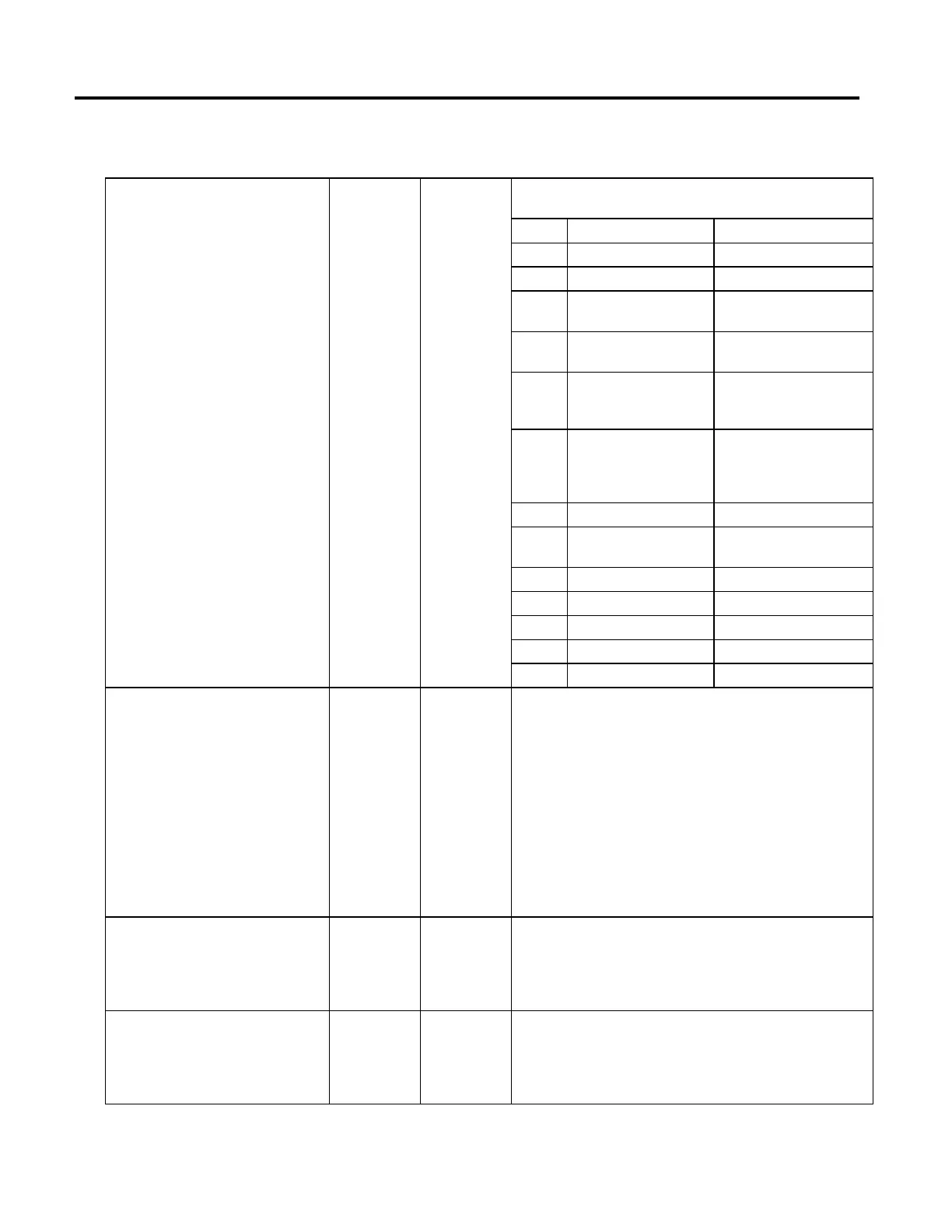
ServoStatusBits DINT GSV G9/Status
The status bits for your servo loop
Bit Bit Name Meaning
0 ServoActionStatus Set when servo action is enabled.
1 DriveEnableStatus Set when drive is enabled.
2 AxisShutdownStatus Set when axis is in shutdown
state.
3 ProcessStatus Set when axis tuning or hookup
diagnostic operation is in progress.
4 OutputLimitStatus Set when magnitude of the output
has reached or exceeded
configured output limit value.
5 PositionLockStatus Set when magnitude of axis
position error has become less
than or equal to the Position Lock
Tolerance value of the axis.
6 HomeInputStatus Set when Home Input is active.
7 RegistrationInputStatus Set when registration 1 input is
active.
8 Registration2InputStatus Not available.
9 PositiveOvertravelInputStatus Not available.
10 NegativeOvertravelInputStatus Not available.
11-15 Reserved
16-31 Reserved
SoftOvertravelFaultAction SINT GSV/SSV G11/Configuration
Sets the type of action performed when a soft overtravel fault occurs.
Value/Meaning:
0 = shutdown – most severe action to a fault and is reserved for faults that could
endanger machinery or personnel.
1 = disabled drive – when the fault occurs the drive is immediately disabled, the
servo output zeroed, and drive enable output is deactivated
2 = stop command – when fault occurs the axis immediately begins decelerating
the axis command position to a stop at the configured Maximum Deceleration
Rate without disabling servo action or the servo module’s Drive Enable Output.
This is the gentlest stopping action for a fault.
3 = status only – when set to status only, motion faults must be handled by the
application program.
StartActualPosition REAL GSV G1/Status
Stores the actual position of your axis at precisely the instant motion begins when
a new motion planner instruction starts for the axis.
You can use this value to correct for any motion occurring between the detection
of an event and the action initiated by the event.
StartCommandPosition REAL GSV G4/Status
Stores the command position of your axis at precisely the instant motion begins
when a new motion planner instruction starts for the axis.
You can use this value to correct for any motion occurring between the detection
of an event and the action initiated by the event.
 Loading...
Loading...







