Motion Error Codes, faults, and attributes
Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018 605
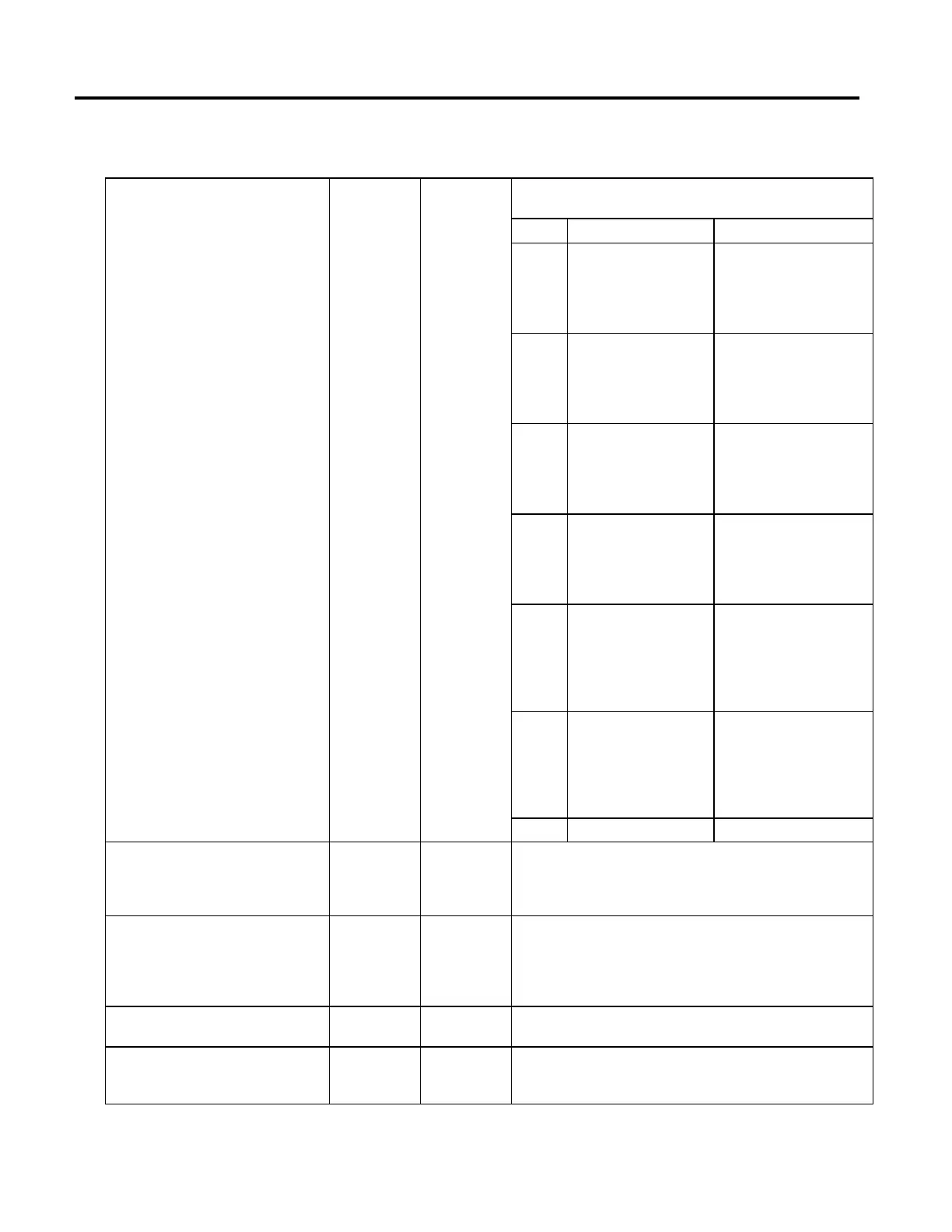
TuningConfigurationBits DINT GSV/SSV G11/Configuration
The tuning configuration bits for your axis
Bit Bit Name Meaning
0 TuningDirectionReverse It determines the direction of the
tuning motion profile initiated by
the MRAT instruction. If set (true),
goes in reverse or negative
direction.
1 TunePositionErrorIntegrator Determines whether or not the
MAAT instruction calculates a
Position Integral Gain value. If set
to clear (false), Position Integral
Gain is set to zero.
2 TuneVelocityErrorIntegrator Determines whether or not the
MAAT instruction calculates a
Velocity Integral Gain value. If set
to clear (false), Velocity Integral
Gain Gain is set to zero.
3 TuneVelocityFeedforward Determines whether or not the
MAAT instruction calculates a
Velocity Feedforward Gain value. If
set to clear (false), Velocity
Feedforward Gain is set to zero.
4 AccelerationFeedforward Determines whether or not the
MAAT instruction calculates an
Acceleration Feedforward Gain
value. If set to clear (false),
Acceleration Feedforward Gain is
set to zero.
5 TuneVelocityLow-PassFilter Determines whether or not the
MAAT instruction calculates an
Output Filter Bandwidth value. If
set to clear (false), Output Filter
Bandwidth is set to zero disabling
the filter.
6 Reserved
TuningSpeed
G11/Configuration
Determines the maximum speed of the MRAT instruction initiated tuning motion
profile. It should be set to the desired maximum operating speed of the motor
prior to running the MRAT instruction.
TuningTorque
G11/Configuration
Determines the maximum torque of the MRAT initiated tuning motion profile. Set
it to the desired maximum safe torque level prior to running the MRAT instruction
to ensure the most accurate measure of the acceleration and deceleration
capabilities of the system.
TuningTravelLimit
G11/Configuration
Used by the MRAT instruction to limit the travel of the axis during tuning.
VelocityCommand
G11/Status
The current velocity reference to the velocity servo loop for a specified axis. It
represents the output of the outer position control loop.
 Loading...
Loading...







