Motion State Instructions
66 Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018
that require Speed-limited Adjustable Torque (SLAT) modes. SLAT operation
mode provides automatic speed control under certain conditions.
The SLAT Configuration is an enumerated attribute that determines how the
drive controls torque for this axis instance. To support applications that require
SLAT control, the Min/Max torque control enumerations provide a feature to
automatically switch to and from speed control under certain conditions. In either
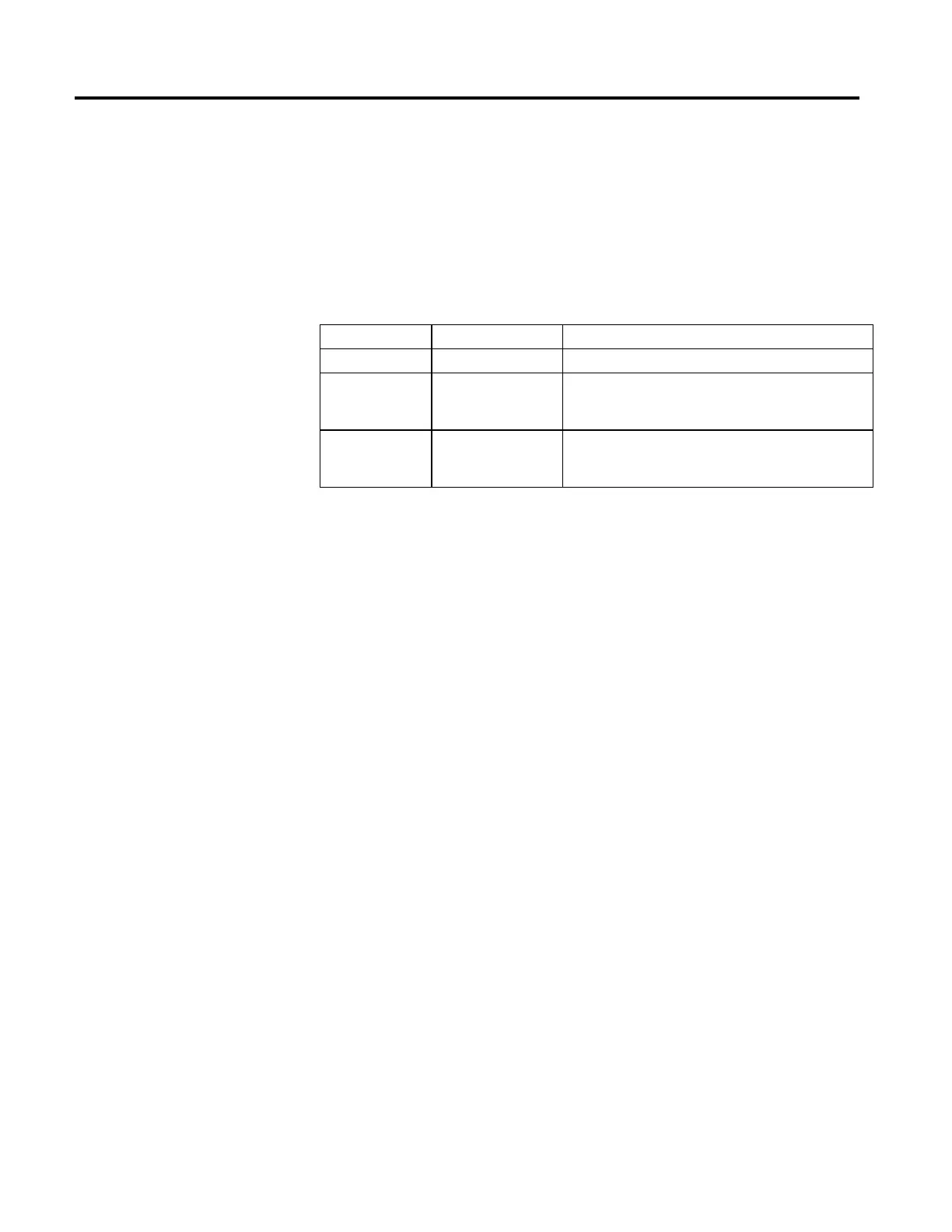
SLAT mode the drive operates in one of the states described in the following table.
Enumeration Mode Description
0 SLAT disabled SLAT function is disabled. This is the normal Velocity Loop operation.
1 SLAT Min Speed/Torque Drive automatically switches from torque control to speed control if
Velocity Error > SLAT set point and switches back to torque control if
Speed Error < 0.
2 SLAT Max Speed Torque Drive automatically switches from torque control to speed control if
Velocity Error < -SLAT set point and switches back to torque control if
Speed Error > 0.
When you execute the MDS instruction and the drive is configured for velocity
control, the acceleration and deceleration ramp to the specified speed is controlled
by the drives based on the Acceleration Limit and Deceleration Limit attributes.
The Motion Planner takes the value from the Direct Command Velocity attribute
and sums it into the axis output before sending the command to the drive. The
most common use of this instruction is to perform a Drive Start application into a
spinning motor, also known as a Flying Start application.
The axis remains in DirectVelocityControlStatus Command attribute or
DirectTorqueControlStatus Command attribute modes until canceled by one of
the following instructions:
• Motion Axis Stop (MAS)
• Motion Axis Shutdown (MASD)
• Motion Coordinated Shutdown (MCSD)
• Motion Group Shutdown (MGSD)
• Motion Servo Off (MSF)
Depending on how the fault action is configured, an axis fault can also cancel the
MDS instruction.
Execution of the MDS instruction has no effect on motion group or coordinate
system objects. However, the instruction affects axis objects as follows:
When the MDS instruction is initiated without errors, the
DirectVelocityControlStatus bit of the MotionStatus axis attribute is set,
indicating the DirectVelocityControlStatus bit is active on the axis.
 Loading...
Loading...







