Astraada DRV-24 frequency inverters Communication protocol
105
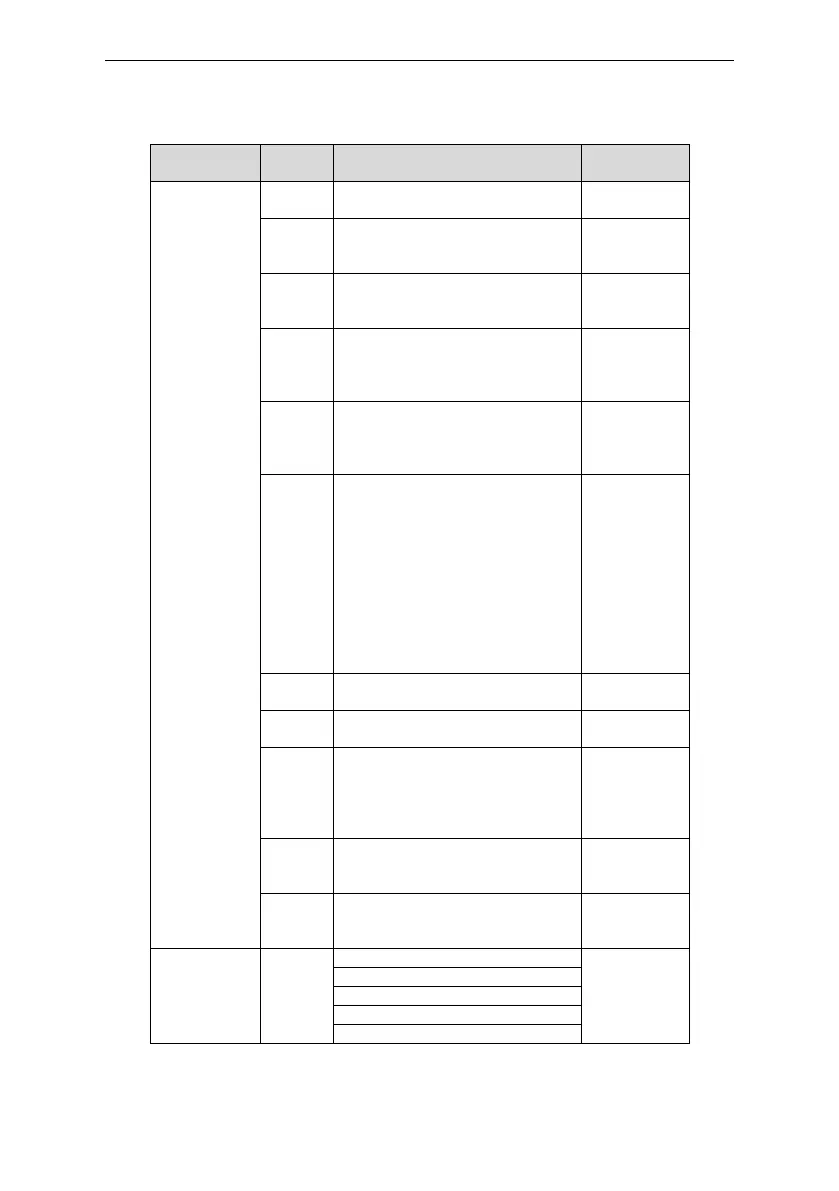
1000 corresponds to the 100.0% of
the rated current of the motor)
The upper limit frequency setting
during forward rotation(0~Fmax(unit:
0.01Hz))
The upper limit frequency setting
during reverse rotation(0~Fmax(unit:
0.01Hz))
The upper limit torque of
electromotion torque (0~3000, 1000
corresponds to the 100.0% of the
rated current of the motor)
The upper limit torque of braking
torque (0~3000, 1000 corresponds
to the 100.0% of the rated current of
the motor)
Special control command word
Bit0~1:=00:motor 1 =01:motor 2
=10:motor 3 =11:motor 4
Bit2:=1 torque control prohibit
=0: torque control prohibit invalid
Bit3: =1 power consumption clear
=0: no power consumption clear
Bit4: =1 pre-exciting =0:
pre-exciting prohibition
Bit5: =1 DC braking =0: DC
braking prohibition
Virtual input terminal command ,
range: 0x000~0x1FF
Virtual input terminal command ,
range: 0x00~0x0F
Voltage setting value(special for V/F
separation)
(0~1000, 1000 corresponds to the
100.0% of the rated voltage of the
motor)
AO output setting 1
(-1000~1000, 1000 corresponds to
100.0%)
AO output setting 2
(-1000~1000, 1000 corresponds to
100.0%)
 Loading...
Loading...