8 | Functions Baumer
28 Operating Manual OM20/ OM30 RS485 with Modbus RTU | V1
Moving Average filter
This filter smoothes the signal course by calculating the average of a specified number of mea-
sured values in a string of numbers. Due to average calculation, a change in distance becomes
increasingly visible.
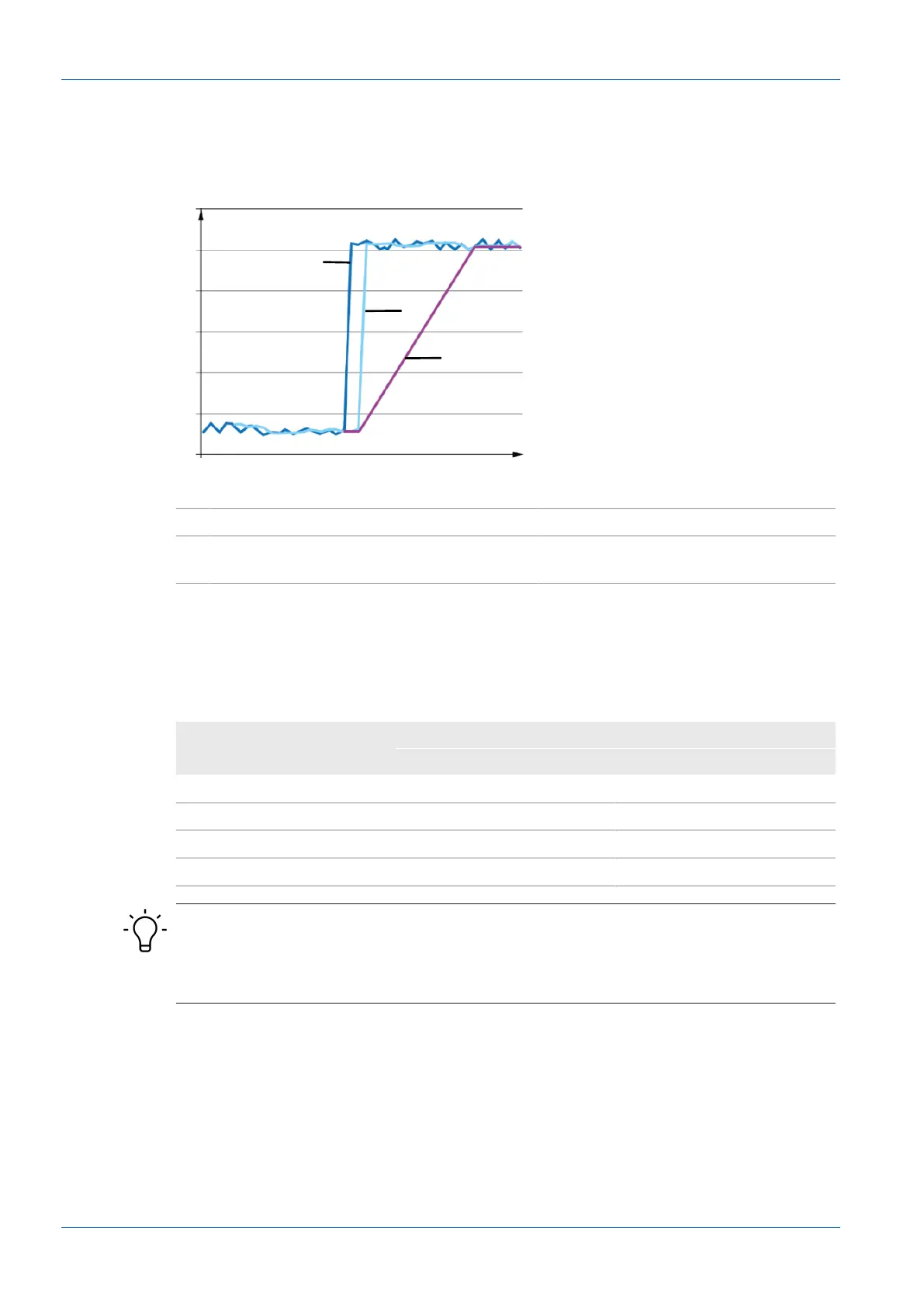
Ill.7: Moving Average filter
1 Raw data 2 Data after filtering with Moving Median
3 Data after filtering with Moving Average
and Moving Median
The higher the number of measured values per filter, the longer the response time of the sen-
sor. This means that a change in distance only becomes fully visible for the output after a delay.
Option 1: Select the required filter length from predefined filter lengths
The following selection options are available:
Value
Number of measured values
Moving Median Moving Average
Standard 1 1
High 9 1
Very High 9 16
Highest 9 128
INFO
When several sensors are calculated, for example, for thickness measurement, the Standard fil-
ter should always be chosen to obtain a raw measured value of both sensors for further calcula-
tions.