Baumer Functions | 8
OM20/ OM30 RS485 with Modbus RTU | V1 Operating Manual 31
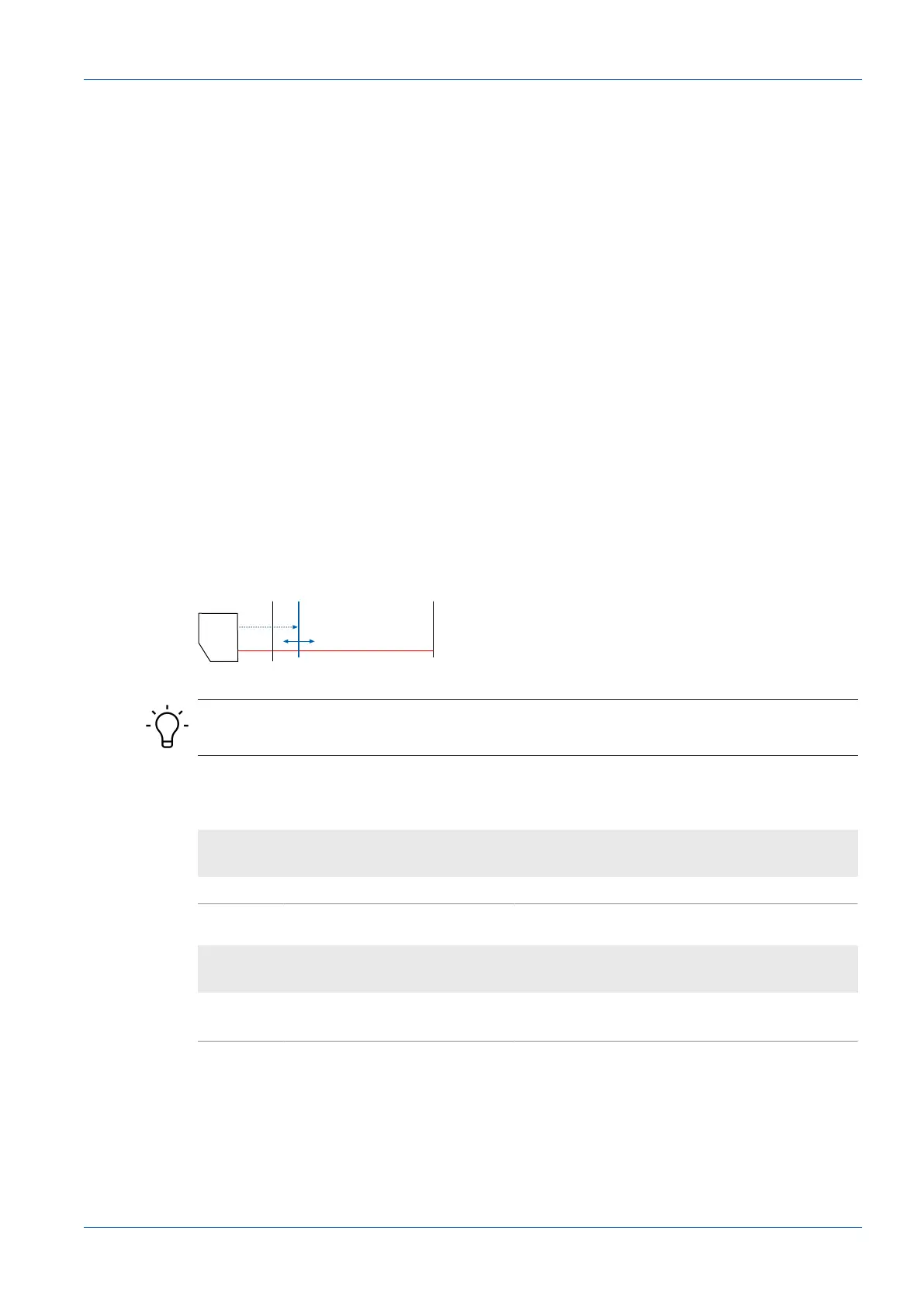
8.4 Zero position
The measured distance value is relative to the set zero point position. By default, the zero posi-
tion of the sensor coincides with the sensor front and can be set to any value between 0 and the
maximum measurement distance of the sensor.
The distance value and the switching point positions are calculated relative to the zero position.
The function allows tolerance measurements for quality testing, for example.
Example 1:
n
Physical distance to the object to be measured: 150mm
n
Set zero position: 0mm (default setting)
n
Output measured value: 150mm
Example 2:
n
Physical distance to the object to be measured: 150mm
n
Set zero position: 150mm
n
Output measured value: 50mm
The following options are available to you for parameterizing the zero position:
n
Define the zero position numerically.
n
Teach in the zero position by writing the address 185 to the currently measured distance.
Ill.8: Zero position
INFO
Negative values are not permitted for the zero position.
Modbus RTU command – holding register: zero position
Address 180 – Zero Position:
Address Access
Number of
registers Data type Description
180 - 181 Read/write 2 int32_t Numerical zero position [μm]
Address 185 – Teach Zero Position:
Address Access
Number of
registers Data type Description
185 Write 1 x Teach zero position: Call up the
function by writing any number.