Commissioning
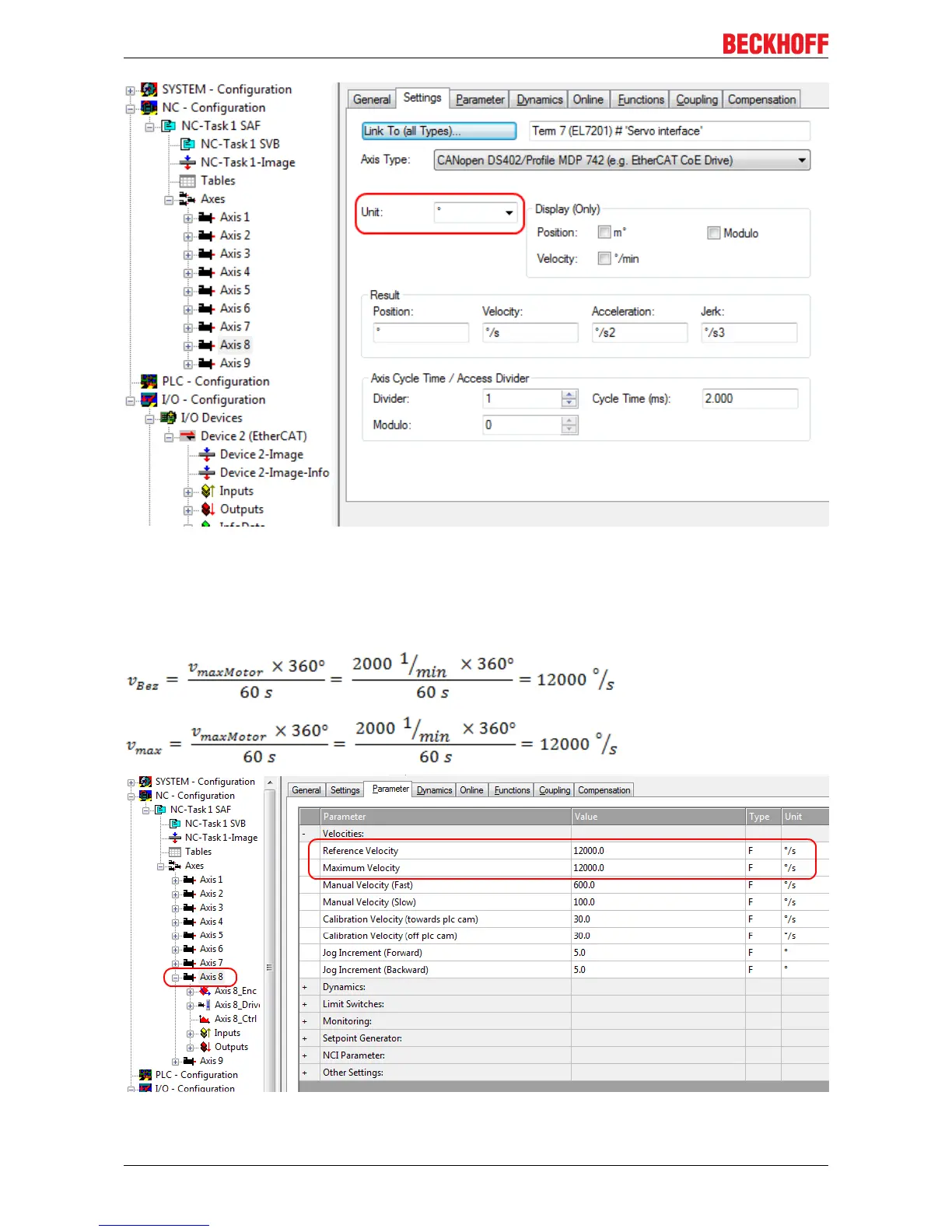
Fig.122: Definition of the unit
Selecting the maximum velocity
The maximum permitted velocity is calculated based on the maximum motor speed (name plate) and the
distance, in this case in relation to 360° per second.
Fig.123: Adjusting the reference velocity
EL72x1-001098 Version: 2.0