CowTech Ciclop 3D Scanning Guide
Fiddle with settings to get Horus to detect
the pattern at as steep angle as possible.
The picture at right is the result of
modifying only the brightness, and gives a
decent angle of detection. Generally, you
want to be able to detect the pattern
when displaced at least 45° from its initial
position directly facing the camera. If you
can do more, do it!
Be patient and experiment. After adding
more light and adjusting all the settings,
we arrive at an angle that’s roughly 65°
from the initial table position. It may take a
little patience and guess and check work to
get it right.
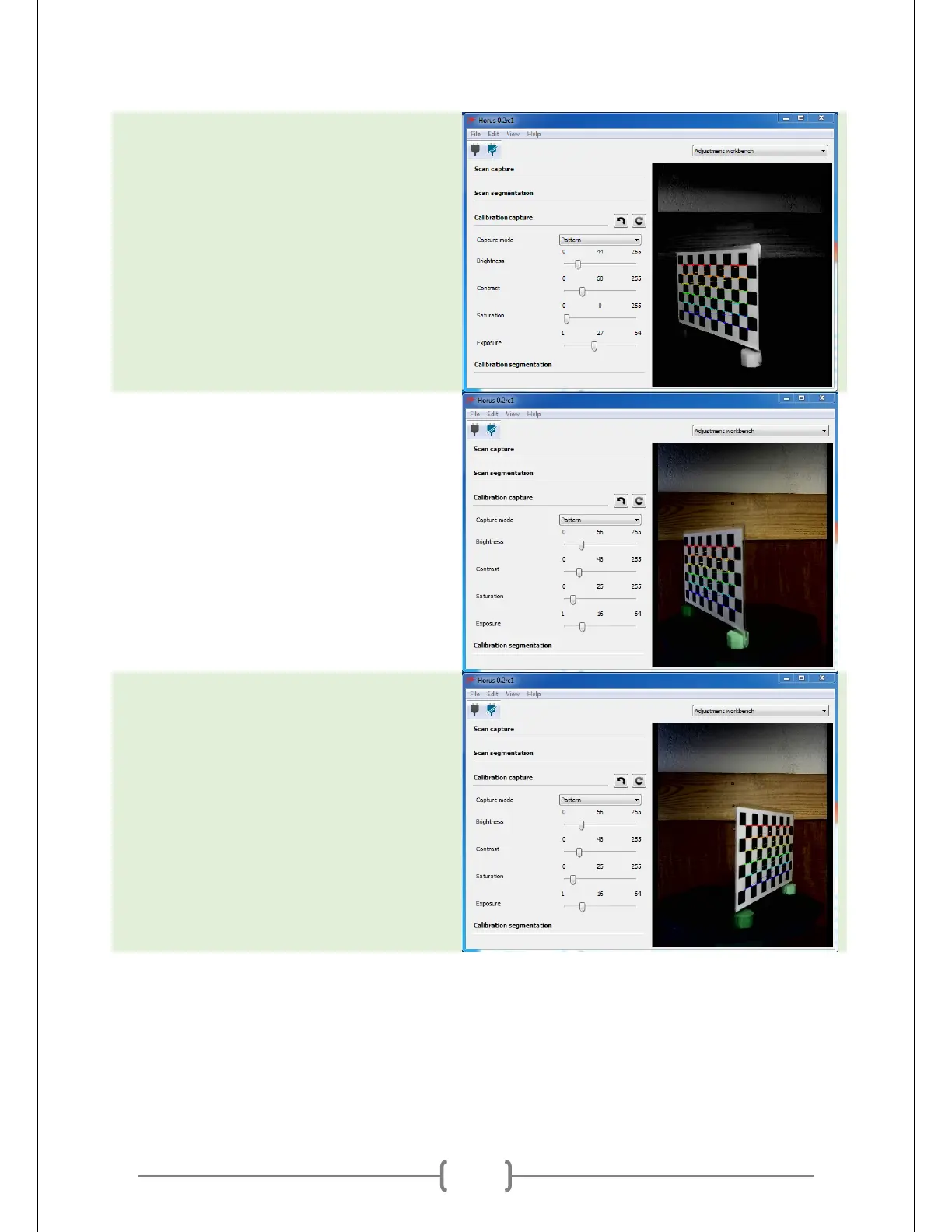
Maximize the range for the other side as
well. The picture at right is the result of
adding some indirect light to the right side
of the table.
Check the pattern when facing the camera directly once again. Slowly rotate the table with your
hand all across the range where the pattern is detected. Sometimes adding more light on the sides
will make the pattern too bright in the center, giving detection on the sides but not in the middle.
Make sure that the rainbow lines are detected along the entire range of rotation from left to right.