Curtis 1220 Manual, Rev. C
21
3 — PROGRAMMABLE PARAMETERS: Motor Control Tuning Parameters
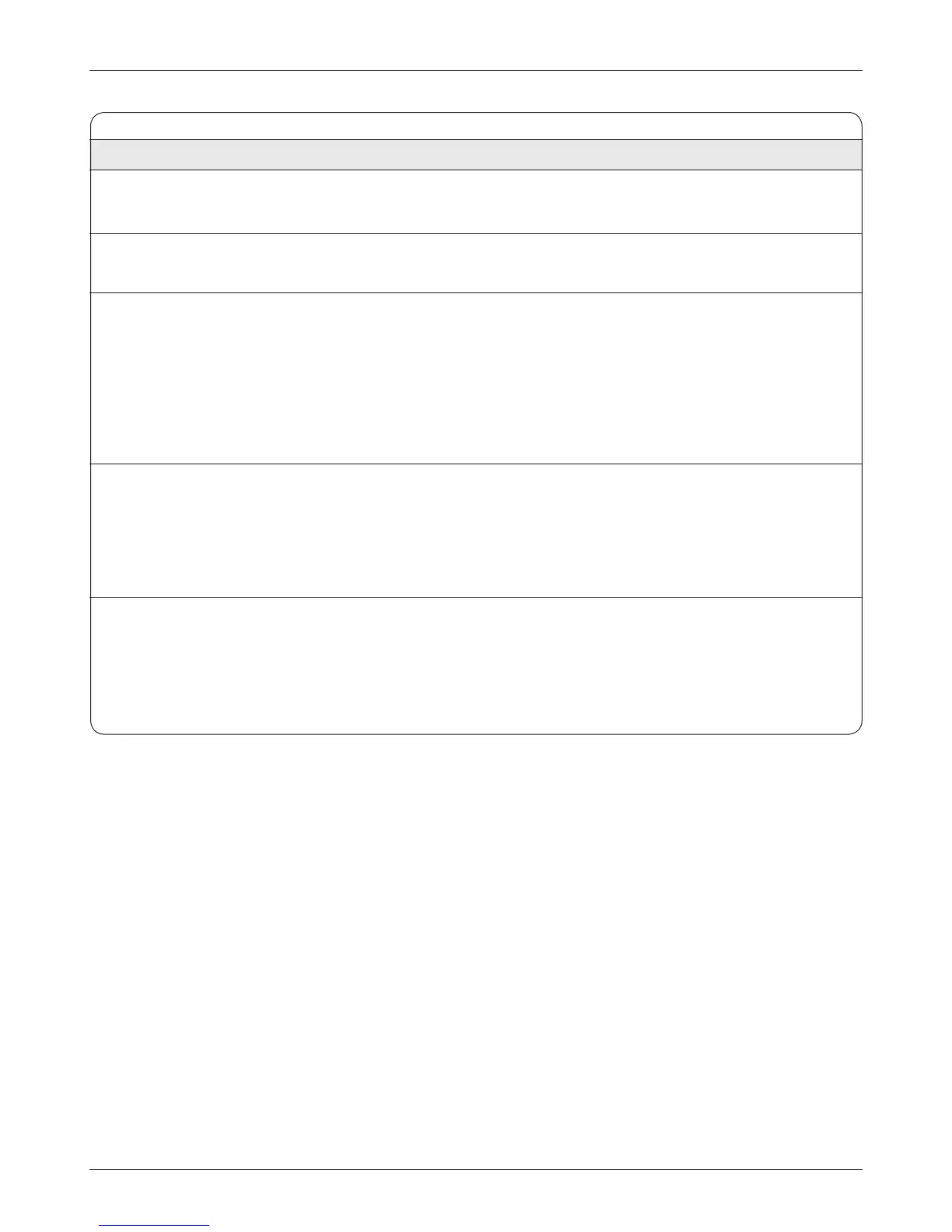
MOTOR CONTROL TUNING MENU
ALLOWABLE
PARAMETER RANGE DESCRIPTION
Following Error Tolerance (deg) 0.0 – 5.0° Denes the maximum difference allowed between command inputs
and position feedback.
Following Error Time 0.0 – 20.0 s Denes the maximum following time allowed during steering and
homing operations.
Position Kp 0 – 100.0 % Determines how aggressively the steer controller attempts to match
the steer position to the commanded steer position. Larger values
provide tighter control.
If the gain is set too high, you may experience oscillations as the
controller tries to control position. If it is set too low, the motor may
behave sluggishly and be difcult to control.
Position Kp can be ne-tuned using the Steering Sensitivity
parameters.
Velocity Kp
0 – 100.0 % Determines how aggressively the steer controller attempts to match
the steer velocity to the determined velocity to reach the desired
position. Larger values provide tighter control.
If the gain is set too high, you may experience oscillations as the
controller tries to control velocity. If it is set too low, the motor may
behave sluggishly and be difcult to control.
Velocity Ki
0 – 100.0 % The integral term (Ki) forces zero steady state error in the determined
velocity, so the motor will run at exactly the determined velocity. Larger
values provide tighter control.
If the gain is set too high, you may experience oscillations as the
controller tries to control velocity. If it is set too low, the motor may take
a long time to approach the exact commanded velocity