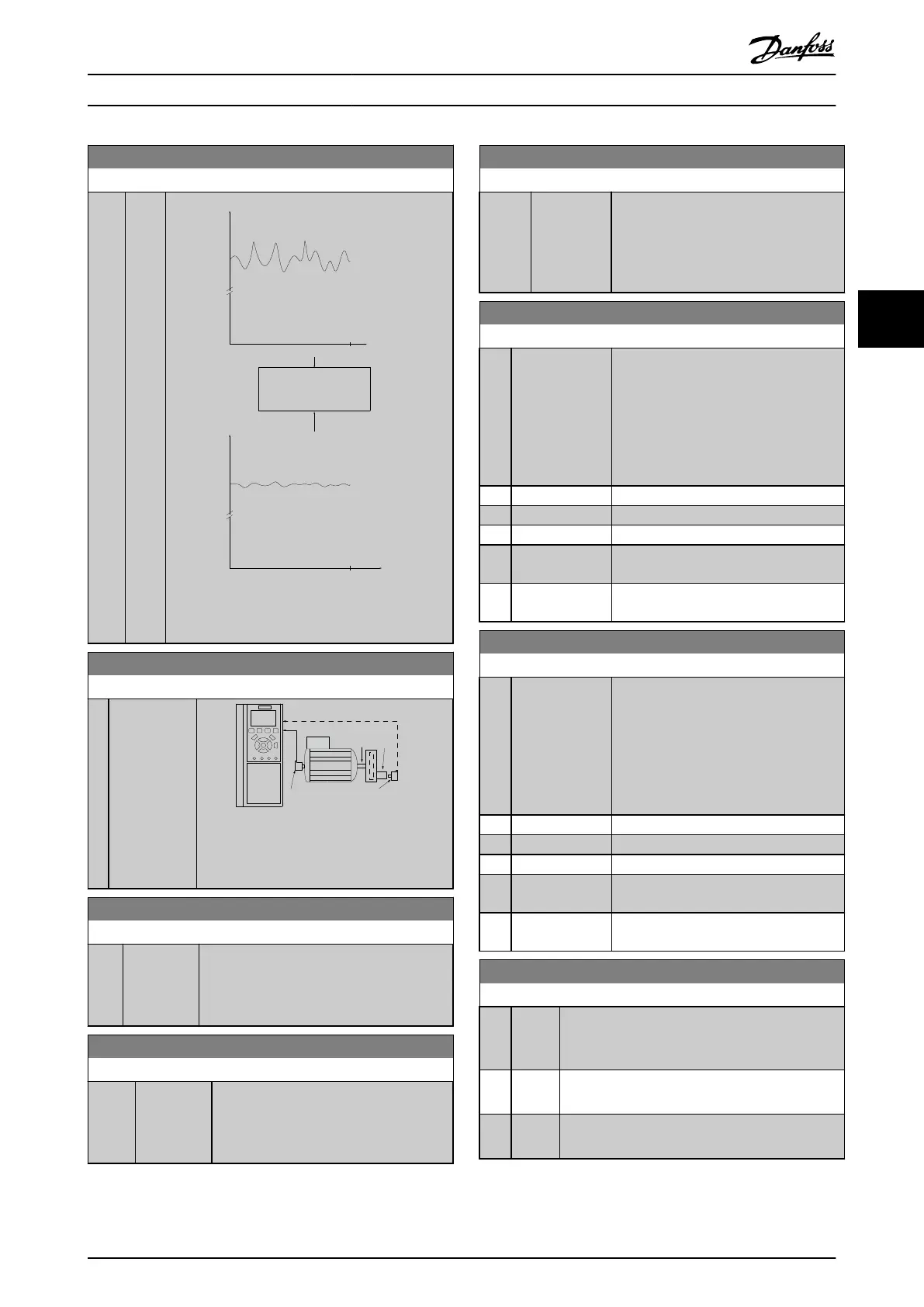
7-06 Speed PID Lowpass Filter Time
Range: Function:
0.6
0.6
f
g
= 10 Hz
175ZA293.11
Feedback
Disturbed feedback signal
t (Sec.)
t (Sec.)
Filtered feedback signal
Lowpass lter
Feedback
Illustration 4.15 Feedback Signal
7-07 Speed PID Feedback Gear Ratio
Range: Function:
1* [0.0001 - 32 ]
Par 7-07=1.00 Par 7-07=n1/n2
130BA871.10
Motor
n1 n2
Illustration 4.16 Speed PID Feedback Gear
Ratio
7-08 Speed PID Feed Forward Factor
Range: Function:
0 %* [0 - 500 %] The reference signal bypasses the speed
controller by the amount specied. This
feature increases the dynamic performance
of the speed control loop.
7-12 Torque PID Proportional Gain
Range: Function:
100 %* [0 - 500 %] Enter the proportional gain value for the
torque controller. Selection of a high value
makes the controller react faster. Too high
a setting leads to controller instability.
7-13 Torque PID Integration Time
Range: Function:
0.020 s* [0.002 - 2 s] Enter the integration time for the torque
controller. The lower the integration time,
the faster the controller reacts. However,
too low a setting leads to controller
instability.
7-20 Process CL Feedback 1 Resource
Option: Function:
The eective feedback signal is made up
of the sum of up to 2 dierent input
signals. Select which input is treated as
the source of the rst of these signals.
The 2nd input signal is dened in
parameter 7-22 Process CL Feedback 2
Resource.
[0] * No function
[1] Analog Input 53
[2] Analog Input 54
[3] Frequency input
29
[4] Frequency input
33
7-22 Process CL Feedback 2 Resource
Option: Function:
The eective feedback signal is made up
of the sum of up to 2 dierent input
signals. Select which input is treated as
the source of the 2nd of these signals.
The rst input signal is dened in
parameter 7-20 Process CL Feedback 1
Resource.
[0] * No function
[1] Analog Input 53
[2] Analog Input 54
[3] Frequency input
29
[4] Frequency input
33
7-30 Process PID Normal/ Inverse Control
Option: Function:
Normal and inverse controls are implemented by
introducing a dierence between the reference
signal and the feedback signal.
[0] * Normal Sets process control to increase the output
frequency.
[1] Inverse Sets process control to decrease the output
frequency.
Parameter Descriptions Programming Guide
MG07C102 Danfoss A/S © 12/2015 All rights reserved. 67
4 4

 Loading...
Loading...















