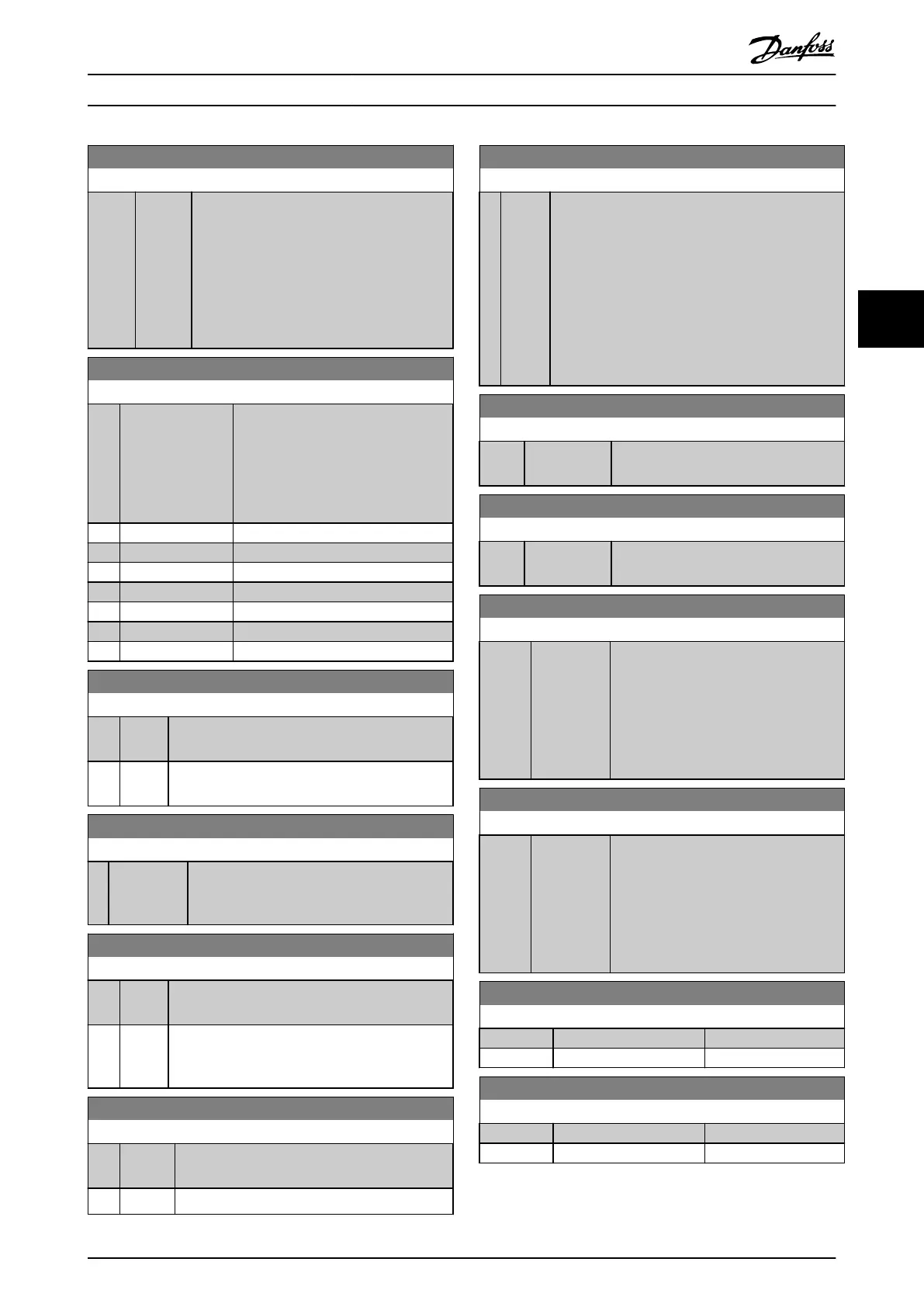
7-44 Process PID Gain Scale at Max. Ref.
Range: Function:
100 %* [0 -
100 %]
Enter a scaling percentage to apply to the
process PID output when operating at the
maximum reference. The scaling percentage is
adjusted linearly between the scale at
minimum reference (parameter 7-43 Process PID
Gain Scale at Min. Ref.) and the scale at
maximum reference (parameter 7-44 Process
PID Gain Scale at Max. Ref.).
7-45 Process PID Feed Fwd Resource
Option: Function:
Select which frequency converter input
is used as the feed forward factor. The
FF factor is added directly to the
output of the PID controller. This
parameter can increase dynamic
performance.
[0] * No function
[1] Analog Input 53
[2] Analog Input 54
[7] Frequency input 29
[8] Frequency input 33
[11] Local bus reference
[32] Bus PCD
7-46 Process PID Feed Fwd Normal/ Inv. Ctrl.
Option: Function:
[0] * Normal Select [0] Normal to set the feed-forward factor to
treat the FF resource as a positive value.
[1] Inverse Select [1] Inverse to treat the feed forward resource
as a negative value.
7-48 PCD Feed Forward
Range: Function:
0* [0 - 65535 ] Readout parameter where the bus
parameter 7-45 Process PID Feed Fwd Resource
[32] can be read.
7-49 Process PID Output Normal/ Inv. Ctrl.
Option: Function:
[0] * Normal Select [0] Normal to use the resulting output from
the process PID controller as is.
[1] Inverse Select [1] Inverse to invert the resulting output
from the process PID controller. This operation is
performed after the feed forward factor is applied.
7-50 Process PID Extended PID
Option: Function:
[0] Disabled Disables the extended parts of the process PID
controller.
[1] * Enabled Enables the extended parts of the PID controller.
7-51 Process PID Feed Fwd Gain
Range: Function:
1* [0 -
100 ]
The feed forward is used to obtain the gain, based
on a well-known signal available. The PID controller
then only takes care of the smaller part of the
control, necessary because of unknown characters.
The standard feed-forward factor in
parameter 7-38 Process PID Feed Forward Factor is
always related to the reference whereas
parameter 7-51 Process PID Feed Fwd Gain has more
options. In winder applications, the feed-forward
factor is typically the line speed of the system.
7-52 Process PID Feed Fwd Ramp up
Range: Function:
0.01 s* [0.01 - 100 s] Controls dynamics of the feed-forward
signal when ramping up.
7-53 Process PID Feed Fwd Ramp down
Range: Function:
0.01 s* [0.01 - 100 s] Controls the dynamics of the feed-
forward signal when ramping down.
7-56 Process PID Ref. Filter Time
Range: Function:
0.001 s* [0.001 - 1
s]
Set a time constant for the reference rst-
order low-pass lter. The low-pass lter
improves steady-state performance and
dampens oscillations on the reference/
feedback signals. However, severe ltering
can be detrimental to dynamic
performance.
7-57 Process PID Fb. Filter Time
Range: Function:
0.001 s* [0.001 - 1
s]
Set a time constant for the feedback rst-
order low-pass lter. The low-pass lter
improves steady-state performance and
dampens oscillations on the reference/
feedback signals. However, severe ltering
can be detrimental to dynamic
performance.
7-60 Feedback 1 Conversion
Option: Function:
[0] * Linear
[1] Square root
7-62 Feedback 2 Conversion
Option: Function:
[0] * Linear
[1] Square root
Parameter Descriptions Programming Guide
MG07C102 Danfoss A/S © 12/2015 All rights reserved. 69
4 4

 Loading...
Loading...















