AH Motion Controller – Operation Manual
7-16
3. When the velocity direction of the current instruction is opposite to that of the buffered
t
Buffered instruction
V
Current
instruction
is started
Current
instruction
The buffered
instruction
is started
The buffer ed instruction starts to control the
axis w hen the motion dir ections of buffered
instruction and current instruction are
opposite and the velocity of cur rent
instruction is decreased to 0.
V
1
V
2
S1
S2
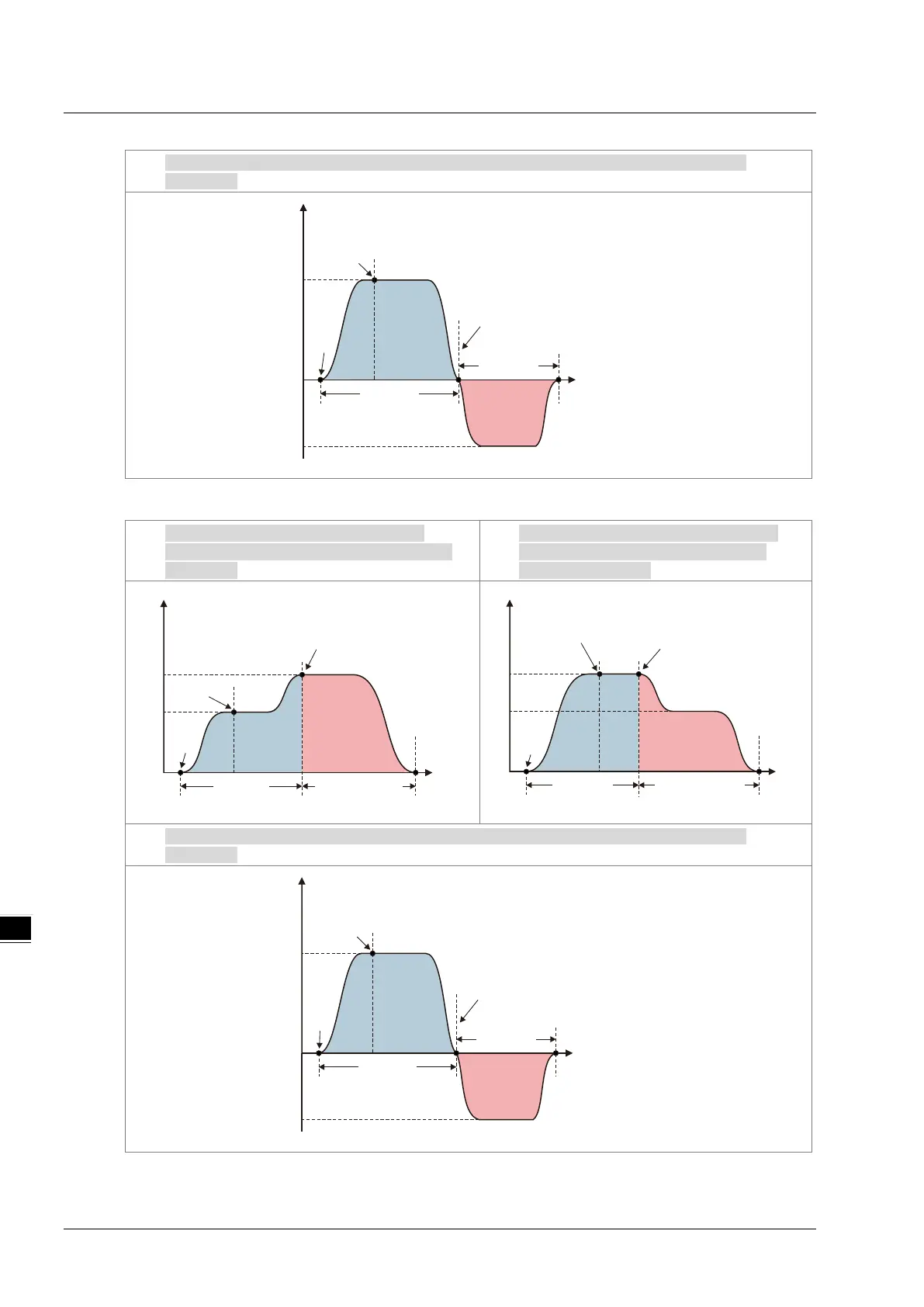
Buffermode = mcBlendingHigh: see the three examples below.
1. When the target velocity of the current
instruction is less than that of the buffered
2. When the target velocity of the current
instruction is greater than that of the
t
Buffer ed instruction
V
Current
instruction
is started
Current
instruction
The buffered
instruction
is started
The buffered instruction starts to control the axis
when current instruction execution is com pleted
and the axis vel ocity r eaches the higher of
the two instruction velocities.
V
2
V
1
S1
S2
t
t
Buffered i nstruction
V
Current
instr uction
is started
Cur rent
instruction
The buffered
instruction
is started
The buffered instruction starts to control the
axis w hen current instruction execution is
completed and the axis velocity is the
higher of the two i nstruction velocities.
V
1
V
2
S1
S2
3. When the velocity direction of the current instruction is opposite to that of the buffered
t
Buffered instruction
V
Current
instruction
is started
Curr ent
instruction
The buffered
instruction
is started
The buffered instruction starts to control the axis
when the motion di rections of buffered
instruction and cur rent instruction are
opposite and the velocity of current
instruction is decr eased to 0.
V
1
V
2
S1
S2
 Loading...
Loading...


