ASDA-A2 Chapter 3 Wiring
Revision February, 2017 3-33
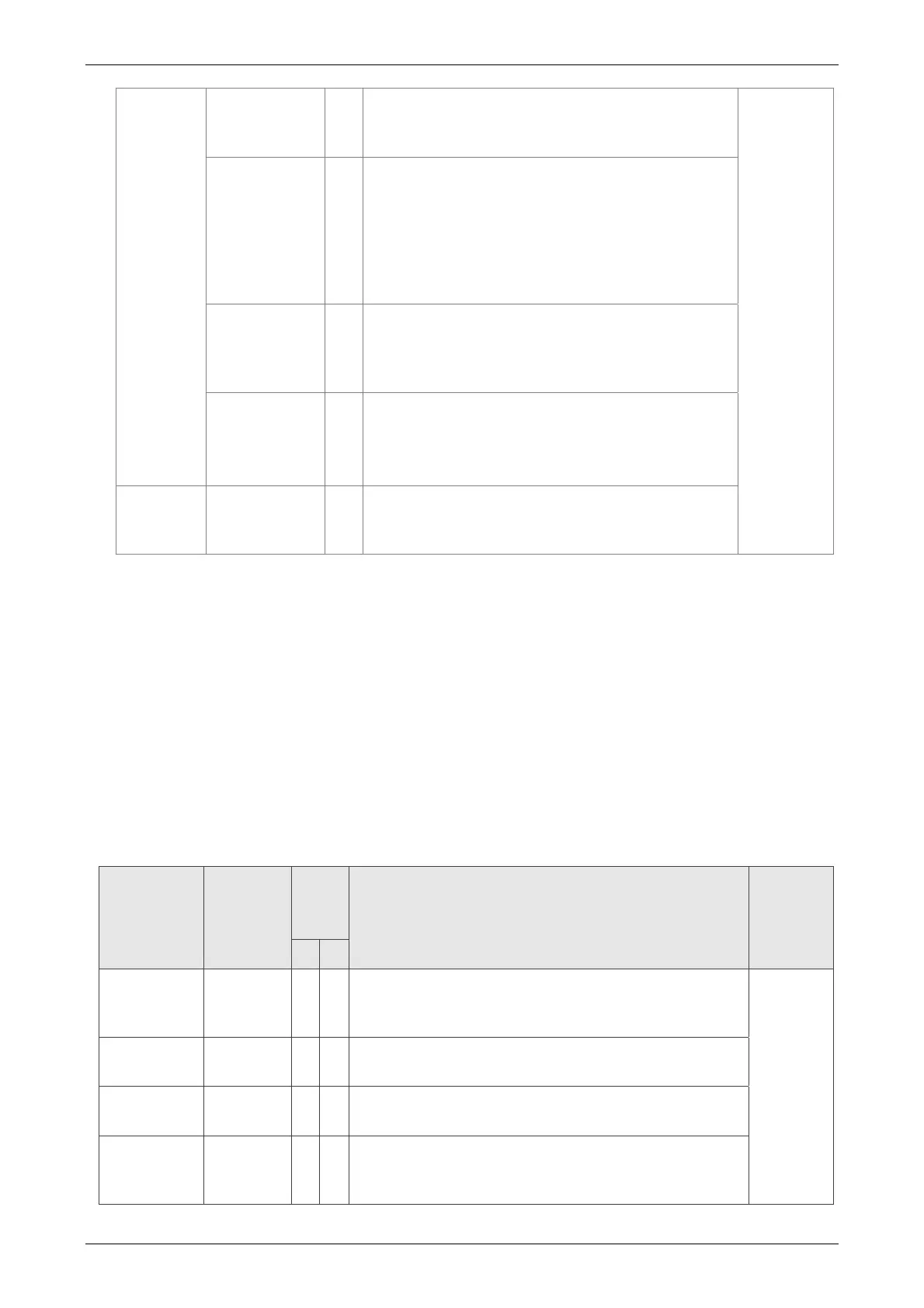
Power
VDD 17
VDD is the +24 V power provided by the drive
and is for Digital Input (DI) and Digital Output
(DO) signal. The maximum current is 500 mA.
-
COM+
COM-
11
45
47
49
COM+ is the common input of Digital Input (DI)
and Digital Output (DO) voltage. When using
VDD, VDD should be connected to COM+. If not
using, it needs to apply the external power (+12
V ~ + 24 V). Its positive end should connect to
COM+ and the negative end should connect to
COM-.
VCC 20
VCC is the +12V power provided by the drive. It
is used for providing the simple analog
command (speed or torque command). The
maximum current is 100 mA.
GND
12,
13,
19,
44
VCC voltage is based on GND.
Other NC 14
NO CONNECTION. This terminal is for internal
use only. Do not connect it, or it may damage
the servo drive.
There are numerous operation mode of this servo drive (please refer to Chapter 6.1). Each
operation mode needs different I/O signal. In order to use the terminal in a more efficient way, the
selection of I/O signal has to be programmable. That is to say, users can choose the desired
DI/DO signal to meet the demand. Basically, the default setting of DI/DO signal has already have
the appropriate function which can satisfy the demand of normal application.
Users have to select the operation mode based on the needs first (please refer to Chapter 6.1 for
the introduction of each mode) and refer to the following DI/DO table to know the corresponding
default setting of DI/DO signal and Pin No of the selected mode in order to conduct the wiring.
The table below lists the default setting of DI/DO signal function and pin No:
The explanation of DO signal default setting is as the followings.
DO Signal
Name
Operation
Mode
Pin
No.
Details
Wiring
Method
(Refer to
3.4.3)
+ -
SRDY ALL 7 6
When the servo drive applies to the power and no
alarm (ALRM) occurs in control circuit and motor
power circuit, this DO is ON.
C5/C6/C7/
C8
SON N/A - -
When the DI.SON is ON and the motor servo circuit
can operate smoothly, this DO is ON.
ZSPD ALL 5 4
When the motor speed is slower than the setting
value of parameter P1-38, this DO is ON.
TSPD
ALL
(except
PT, PR)
- -
When the motor actual speed (r/min) is faster than
the setting value of parameter P1-39, this DO is ON.
 Loading...
Loading...
