ASDA-A2 Chapter 8 Parameters
Revision February, 2017 8-219
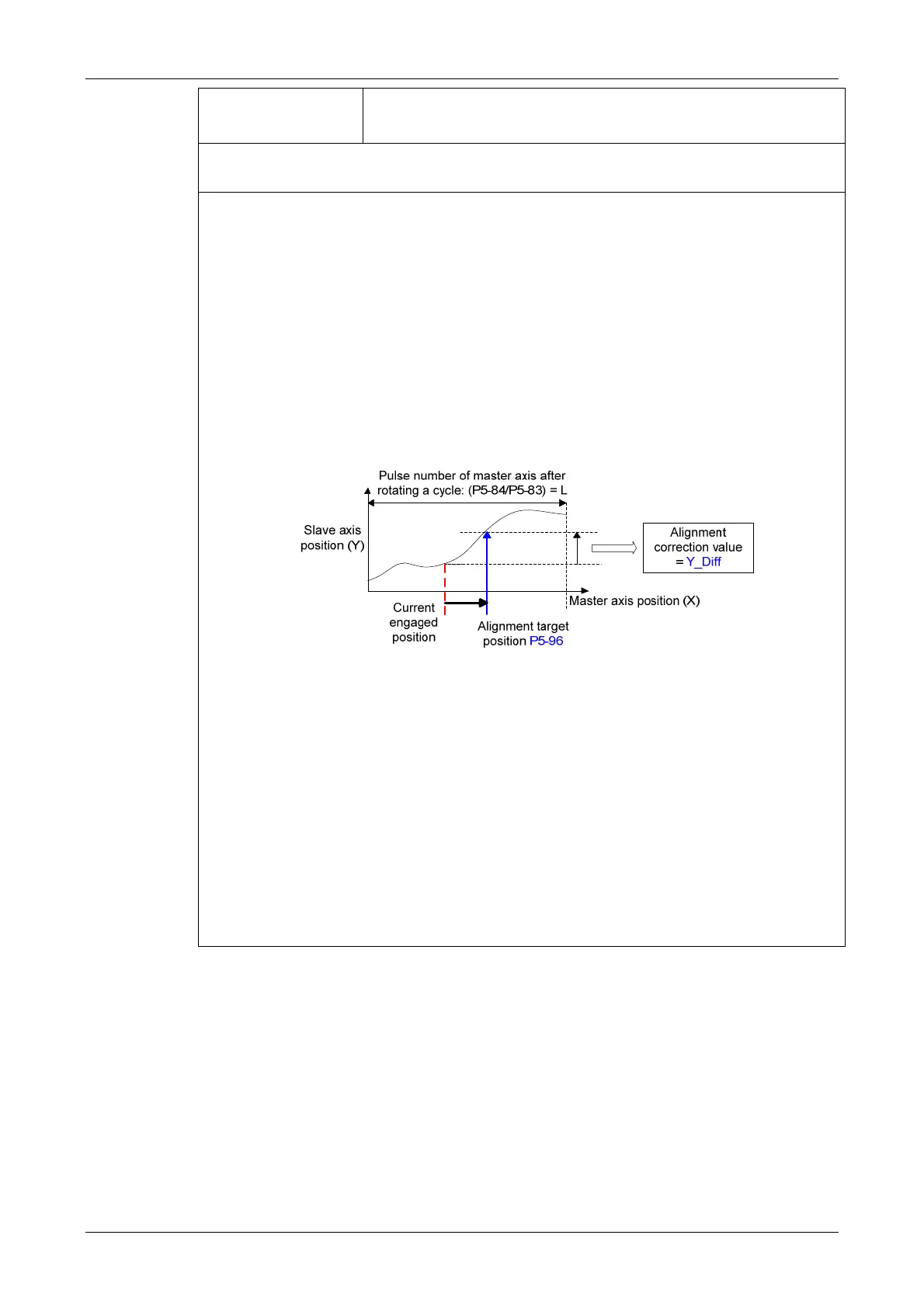
P5-96 (target position of alignment X); Unit: pulse number of
master axis = 0 ~ (P5-84/P5-83) – 1.
Monitoring variable 062(3Eh): It displays the current engaged position of master
axis (X)
This macro command can move the engaged position to the alignment target
position (X) when E-Cam is engaged. And write the alignment correction value into
the specified PR.
During E-Cam operation (When E-Cam is engaged), if desire to quickly align the E-
cam position to the mechanical referral point, sensor can be used to trigger DI.EVx
to execute this macro command.
After E-Cam alignment is completed, the engaged position will move to the new
position. The excess or not enough moving distance after E-Cam operates one
cycle is called alignment correction value. It will be written into PR specified by P5-
93.YX. PR incremental command can be used to compensate this value so that the
slave axis position will remain and offset the phase of E-Cam to align the referral
position of machine. For some applications, set value of P5-93.YX to 0 will do.
Please note that PR can be executed only when triggering the host controller.
*P5-93.UZ is able to limit the max. correction rate. The alignment target position
★ will be different from P5-96.
| alignment target position★ – current engaged position| / L <= P5-93.UZ %
*DI time delay compensation can be set via P5-94, it can correct the error caused
by different speed of motion.
When E-Cam moves from current position to the target one, it can rotate at forward
or reverse position. Due to the cyclic operation, it can reach the target position
either at forward or reverse direction. However, the moving distance between both
is usually different. Use available forward rate to plan the timing of forward and
reverse rotation.
*Available forward rate: The available max. proportion of forward path

 Loading...
Loading...